Experience

Project Management
I have managed many successful projects in different areas, managed projects of total budget $140 Million.

Robotics
I have participated in designing and manufacturing, assembling many robots. Either mobile or fixed robots.

Providing Training
Taught more than 3578 teaching hours, at 28 international training centers, governmental centers, universities, and colleges.
Manage Computer Training Centers
I have been member of the board of management of Resala training centers, Interviewing and Evaluating more than 200 instructor and employee.

Automating Portfolio Management
I have worked in deploying IBM® Rational® Portfolio Manager in IBM Cairo Technology Development Centre.

Telematics
I have worked in the CERT-IBM telematics project, in what is described by Information Week as the largest telematics deal in history of budget $125 Milion.


Embedded Systems for Automotive
I have worked in joint project between IBM and Valeo.

Computer Networks
Design, Installation, and Administration
Lab Establishment
I have participated in establishment of two labs, electronic and PCB FAB labs aimed to help in development of robots.
Robotics & Mechatronics Experiences
Closed-Form Solution of Direct Geometric Model For Stewart Platform
This method is based on six angles instead of the length of the prismatic actuators. Rotary angular sensor is more affordable than LVDT, and much easier to install and maintain. In addition, these six angles provide us with unique solution. Practical constrained is taken into consideration such as the maximum angles of the universal joints. This method doesn’t use any iterations or any numerical solutions so it’s suitable for the real time applications.
Applications use Stewart platform
Flight Simulation

Car Simulators
Sea waves simulation
Earthquake emulators
HYDROïD Arm
I have participated in electronic hardware and software development of the HYDROïD arm & head. Participated in creating many demos. This Project was under supervision of Dr. Samer Alfayad. This Arm was desided by Dr. Samer Alfayad

Demo 1
Demo 2
Demo 3
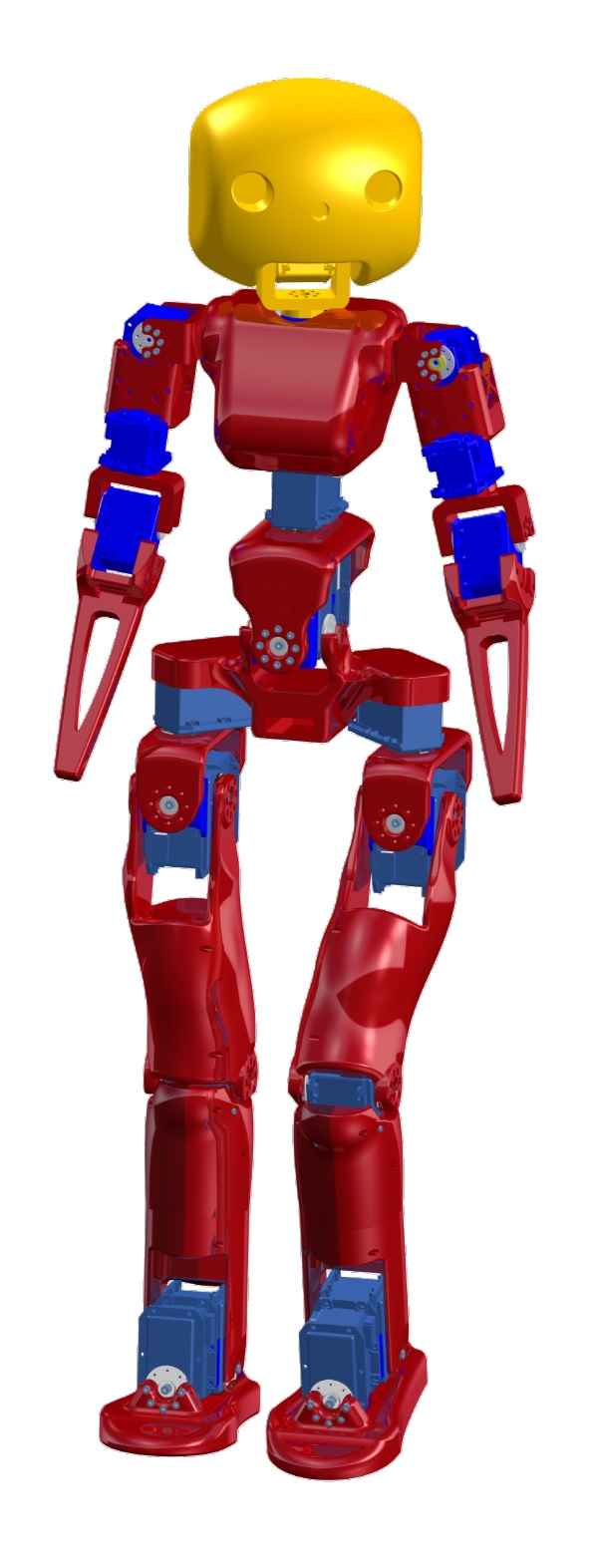
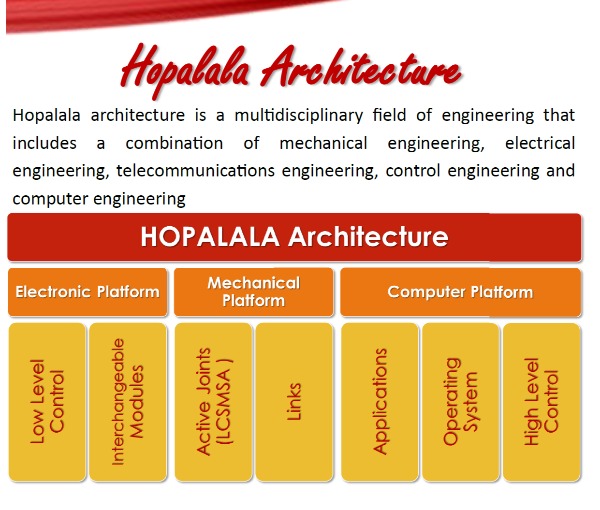
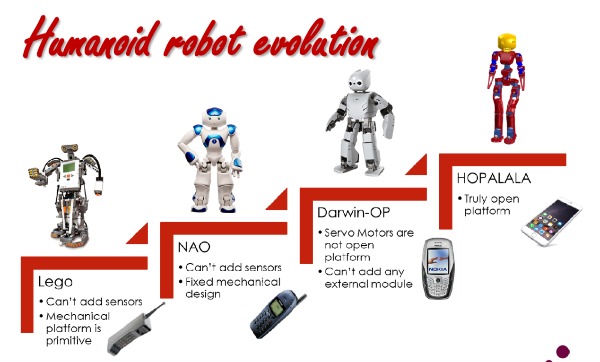
Hobalala
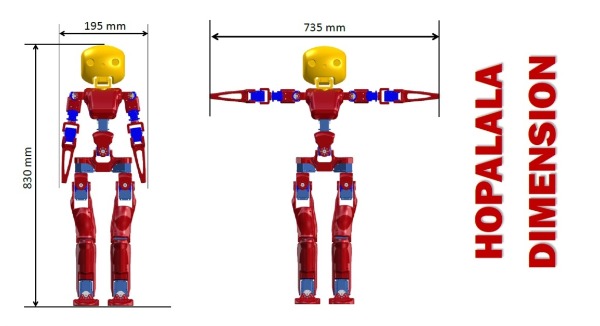
I have participated in developing Safe and Low Cost Educational Open Platform for Humanoid Robot, it can be customized from the mechanical, electrical, sensors, and programming perspectives. It consists of 25 DOF.
This Project was under supervision of Dr. Samer Alfayad.



1. Safe for humans
2. Affordable (Price compared to functionality)
3. Suitable for different ages
4. Suitable for educational and research as well
5. Compatible with different educational systems
6. Open platform (Mechanically, Electronically, Programming)
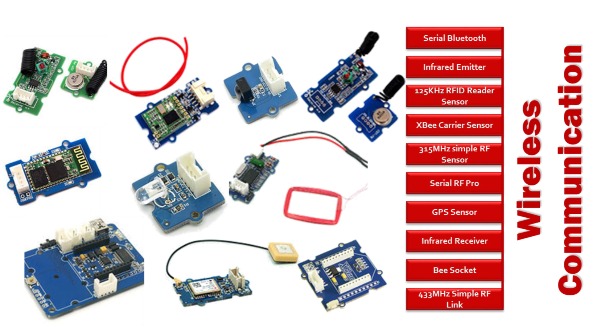
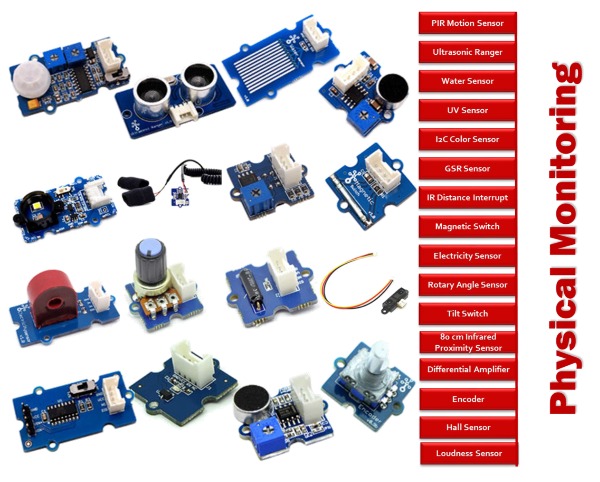
7. Variety of compatible sensors (can attach additional sensors)
8. Upgradable or expandable
9. Customizable electronics
10. Can apply different types of controller not only PID
11. Designed for reassembly
12. Easily programmable
13. Can run different operating systems; Windows or Linux
14. Open actuator platform
15. Lightweight
16. Modular design
17. Easy to handle
18. Easily maintained
19. Human morphology
20. Wide Range of Motion
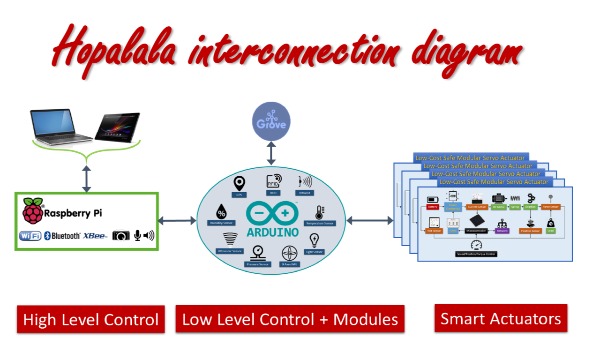
100s OF INTERCHANGABLE MODULES that can be attached to Hopalala


This Project was presented in Icode on 19-05-2016, in SQY Cub Incubator on 08-12-2016, and in other events.


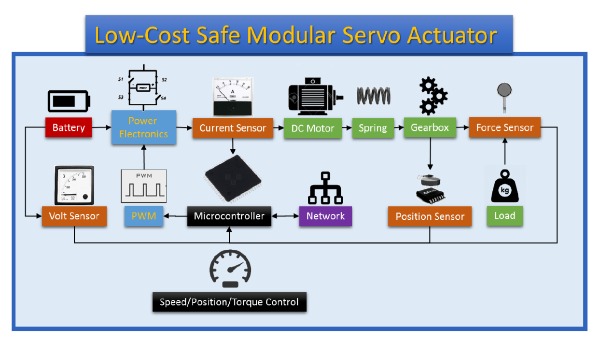
LCSMSA30 & LCSMSA70
I have participated in developing Low Cost Safe Modular Servo Actuators, it consists of Power Electronics Modules, Current sensor, DC motor, Gearbox, Force sensor, volt sensor, Microcontroller, Network, Position sensor. It can be speed/position/torque control.
This Project was under supervision of Dr. Samer Alfayad.
LCSMSA70
LCSMA specifications
MECHANICAL
1. Compact size and shape
2. High power to weight ratio
3. Different sizes for different powers
4. Easy to integrate to the robot
5. Reduced No. of bolts and screw
6. Hard plastic cover
7. engraved slots for heat transfer
8. Reliable Swiss made motors from Maxon
9. Hardened gearbox
VERITY OF SENSORS
1. Contactless Position Sensor with 12 bit resolution
2. Current Sensor
3. Temperature Sensor
4. Voltage Sensor
9. Hardened gearbox
SUPPORTED BY THIRD PARTY SOFTWARE'S
1. Matlab, Simulink, Labview, …etc
2. Facilitate research programs and concluding results
ARDUINO CORE
1. Easy to program
2. Hundreds of examples
3. Enjoy Community development
4. Share development with colleagues
COMPLETELY PROGRAMMABLE
1. Can apply different algorithms
2. Enable/ disable functions
3. Control external modules
CONNECTED IN DAISY CHAIN
1. By use of RS485 communication protocol
2. Reduce cabling
3. Increase Robustness
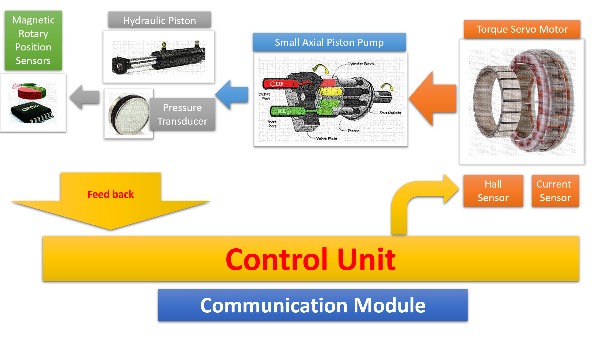
Romeo-2
In this research project, we are presenting new design principle of the humanoid robot’s arm; which is mixing the electric actuators with the hydraulic technology. In ROMEO, one arm will be completely actuated by electric motors which are very fast but has limited torque, and on the other arm, the elbow only will be actuated by compact hydraulic system which has very high torque capabilities.
I have participated in developing the controller and the driver of the motor that drive the hydraulic bump.
This Project was under supervision of Dr. Samer Alfayad.

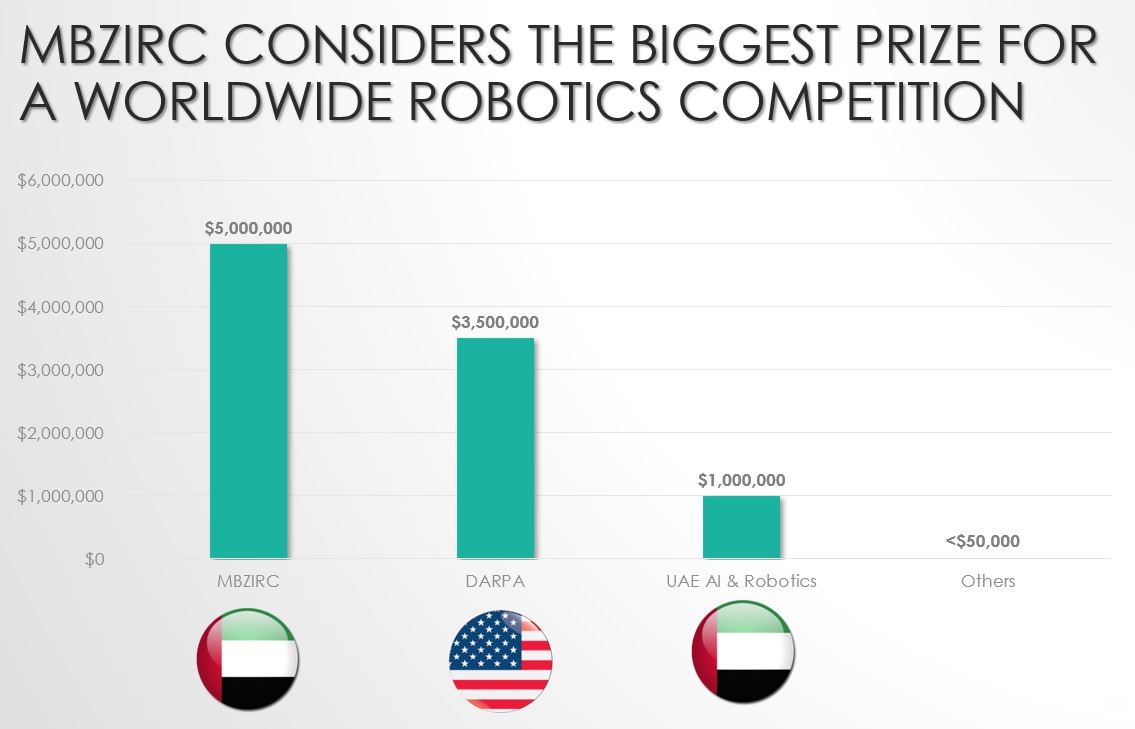
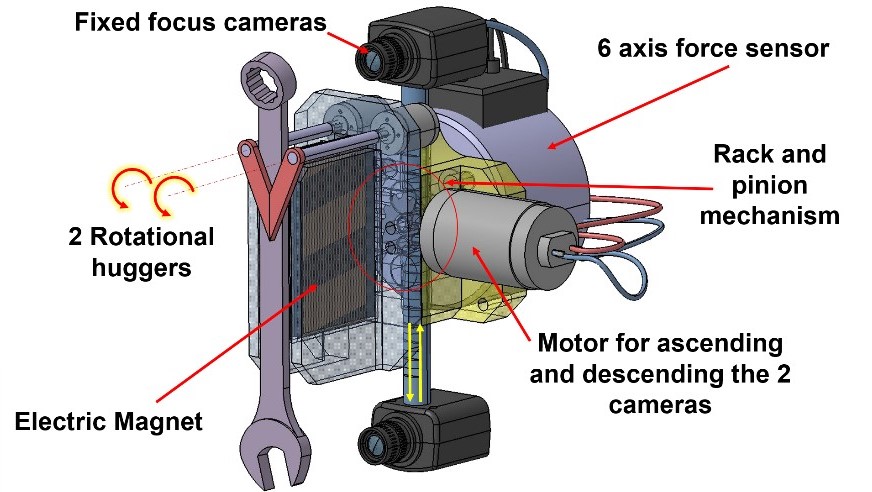
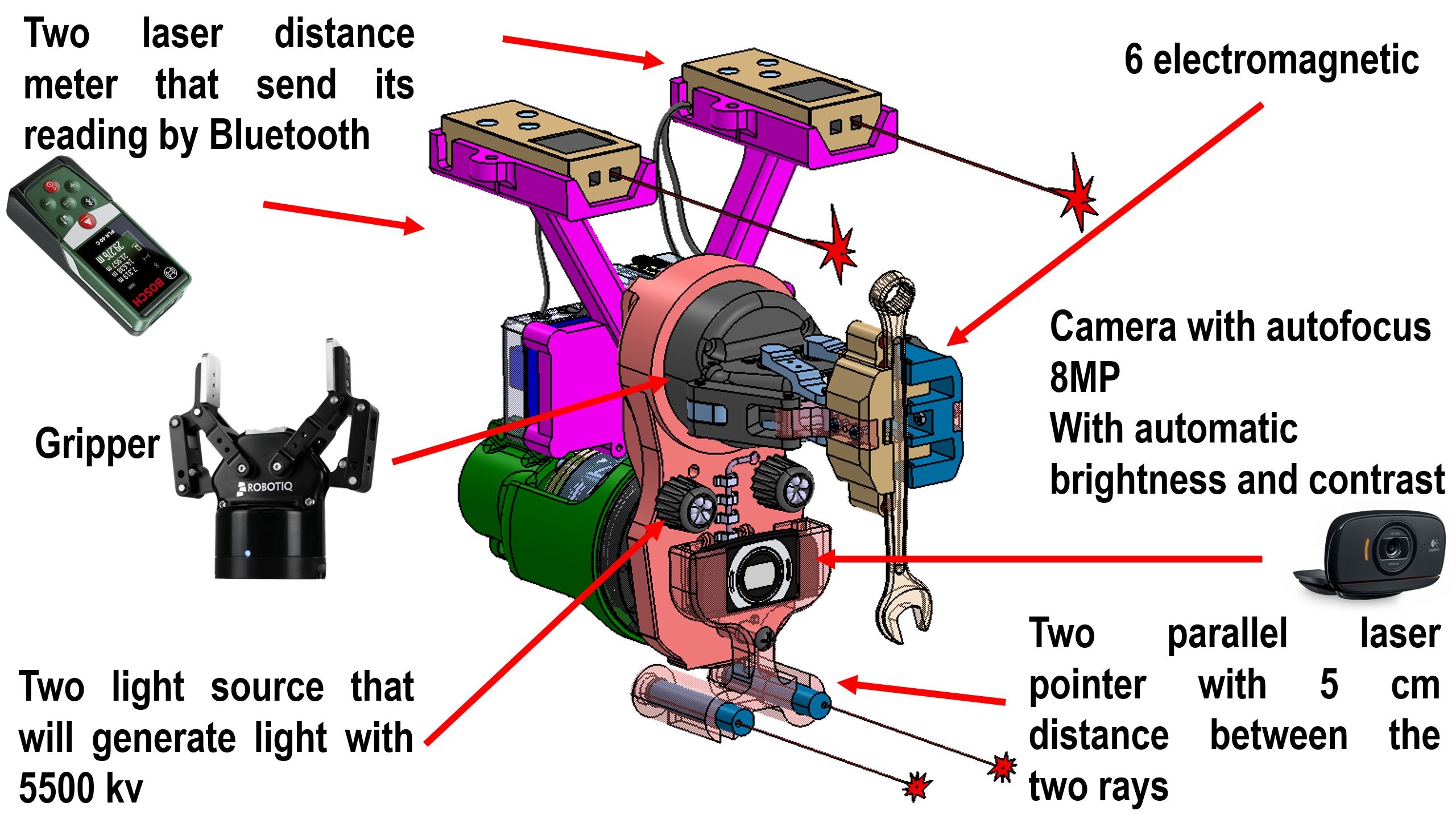
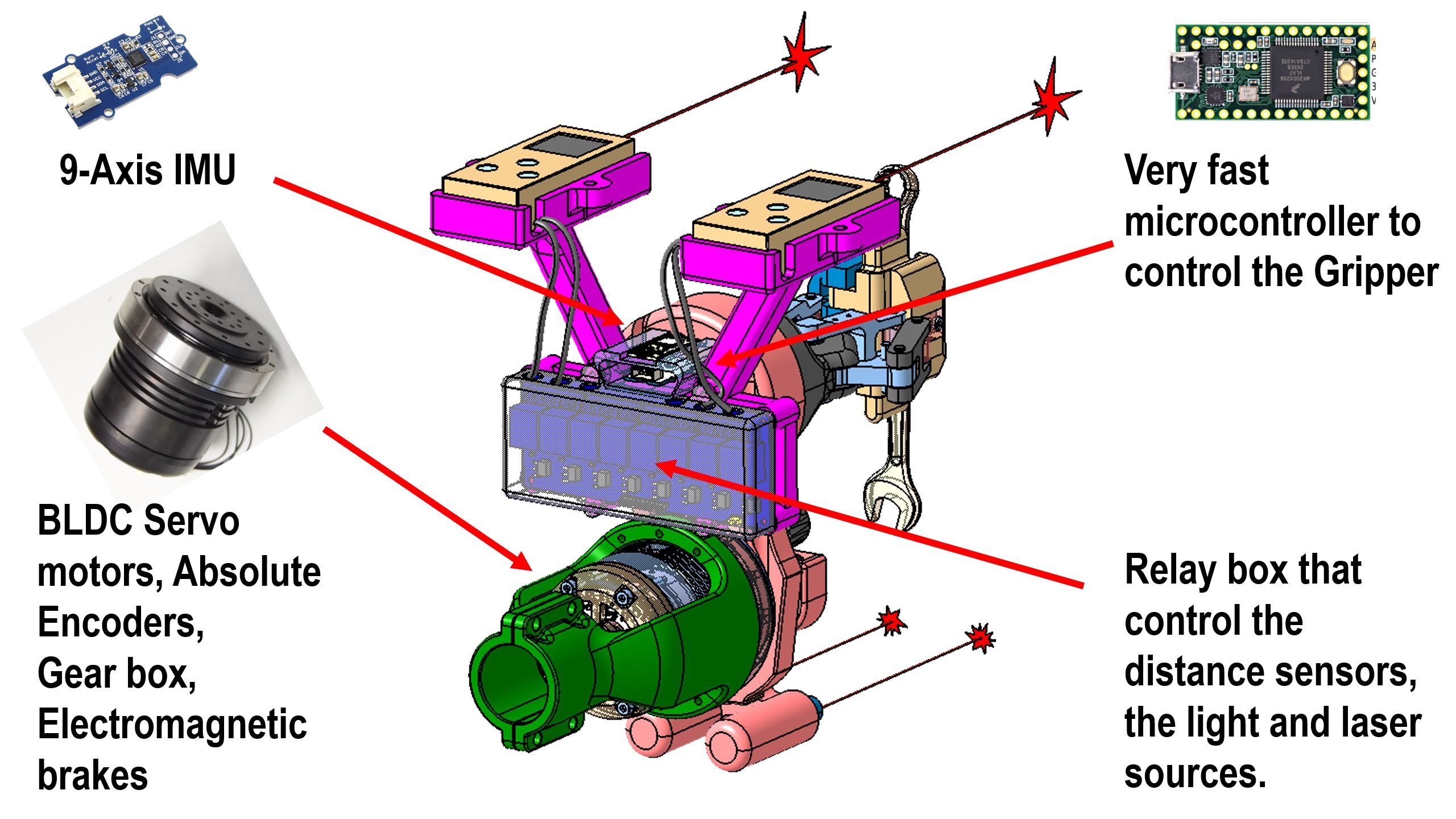
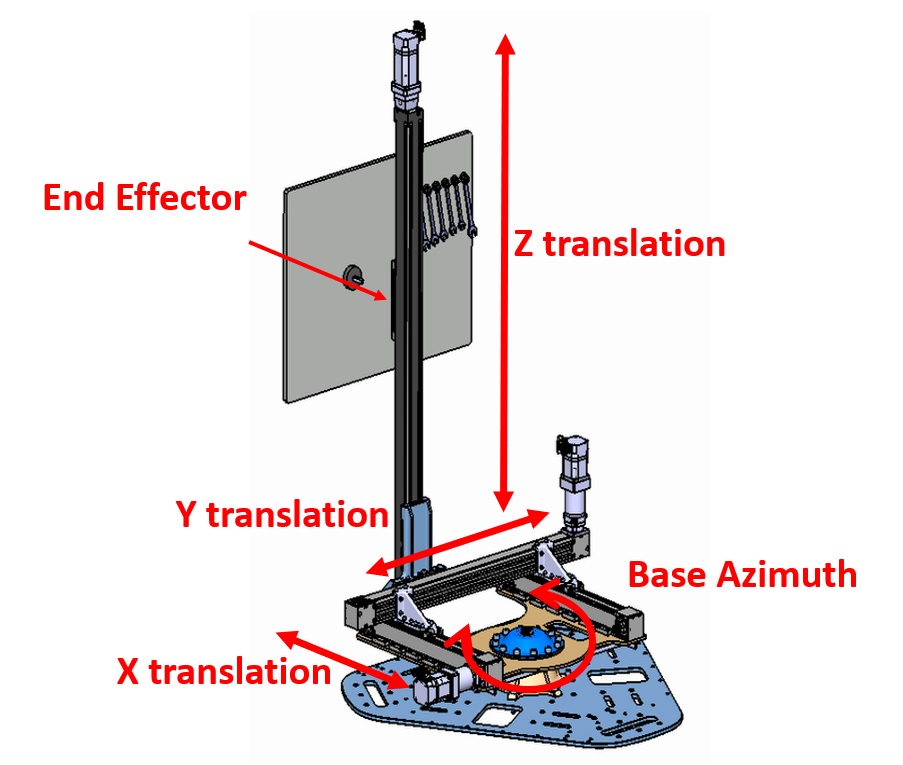
International Robotics Competitions Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017

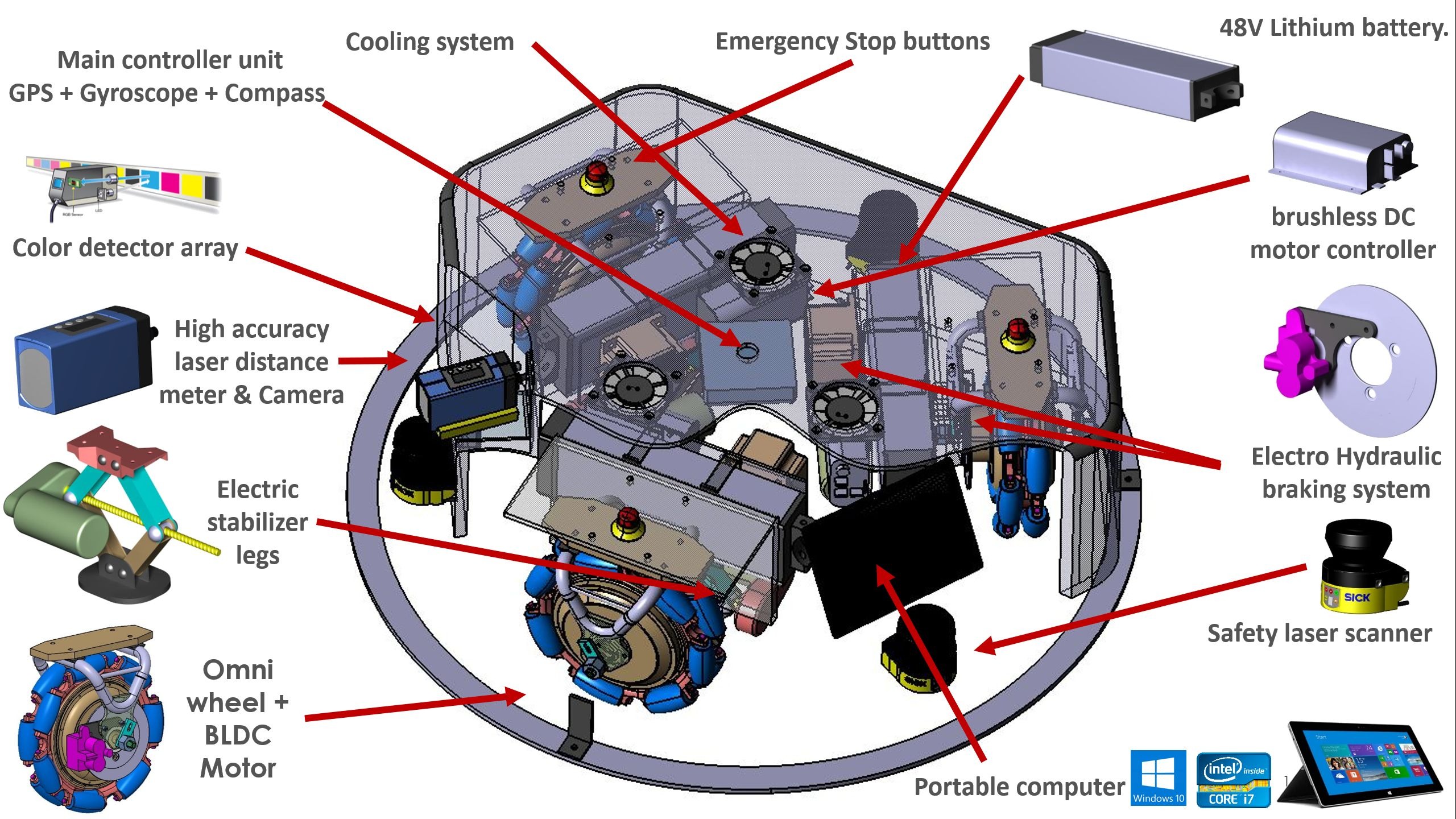
I have participated in MBZIRC-2017 (Abu Dhabi) under Paris-Saclay University which was ranked as 9/143 all over the world.
My role is the System Architect.
We were the ONLY team qualified from France.
- What is MBZIRC
- Demo Videos
- Team Members
- Certificates of Achievement
- Holonomic Mobile base
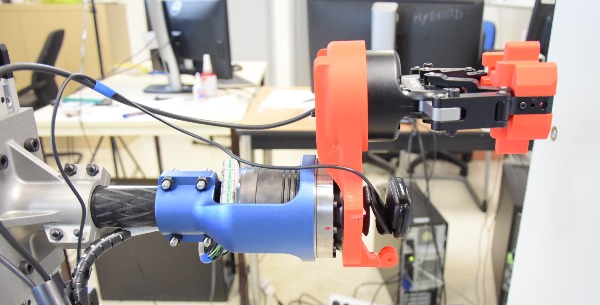
- 6-DOF Articulated Robot Arm
- Smart Gripper V1, V2
- Image Processing Algorithms
- Cartesian Robot Manipulator
- TECHNICAL ADVISORY COMMITTEE
- OUR COMPETITORS
- Photo Gallery
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) is an international robotics competition, to be held every two years.
MBZIRC 2017 Challenge Description
Paris-Saclay University Team
with total prize of USD $5,000,000 .






























































Teaching and Academic Experience
- I’m an internationally recognized expert in providing training.
- I’ve taught more than 3500 Hours for academic and non- academic courses.
- I’ve been MCT (Microsoft Certified Trainer) since 2002
- As a lecturer, I conduct weekly teaching sessions, lectures, assign and grad projects, exercises and assess the progress of students.
- I’ve supervised 162 undergraduate projects, and 6 graduation projects, two of them won in international contest for computer engineering and Industry.
- I’ve taught to many nationalities from Europe, Africa, America and many Arab countries.
- I’ve graded the final and midterm exams, for many academic courses, and non- academic courses.
Photo Gallery with my clients
Trained employees or students from more than 115 Company or Organization in different fields:









Academic Experience

Alumni - Theses Supervised - Graduation Theses
- April 2009 Hend Ahmed, Maha Mahib, Rana Gamal, Passant Yousef, Yasmin Serag, Youmna Shaker. Mobile Point of Sales (Won the best project in 2009)
- April 2009 Dalia Fouad, Bouthina Al-Moussa, Dalia Mina. Automating Recruitment System (Won the Second best project in 2009)
- April 2009 Ayman Farouk, Maher Al-Macdesy ,Moatz Gendia, Shady Awad , Tareq Nazeem. Automating Ticket Online Reservation System (Won the Third best project in 2009)
Spring 2007, Summer 2007, Spring 2008,Summer 2008, Spring 2009, Summer 2009, Spring 2010, Summer 2010 and Spring 2011
- Course name: Object Oriented Programming Using Java
- Course code: BTEC 316
Fall 2007, and Fall 2008
- Course name: Visual Basic.NET 2003, 2005
- Course code: BTEC 311
Spring 2008, and Spring 2009
- Course name: PC Hardware and Maintenance
- Course code: BTEC 105
Trained employees or students from more than 120 Company or Organization
International Certificates




2010

2003

2003

2004

2006

2002

2002

2003

2002

2008
Exams Record
Professional Memberships


since 2001

IEEE Computer Society
since 2008

Project Management Institute
since 2020

Agile Club
since 2004

Egyptian Syndicate of Engineers
since 2011
