Dr. Khaled FOUDA's web Resume This site is under construction
Taught Hours
Managed Project
Years of Experience
Profile I Current Job I Employment History I Educational Records I PhD Research Summary I Master’s Research Summary I Graduation Project I Publications & Patents I Experience I Robotics & Mechatronics Experiences I International Robotics Competitions I Teaching and Academic Experience I International Certificates I Professional Memberships I Previous Projects I Technical Interests I Invited Talks I Personal Skills I Linguistic Skills I Technical Skills I Training Courses I Volunteering & Charity Work I Travel Experience I Hobbies I Honors & Recognition & Awards I References I My Certificates I My Heroes I Personal Information I Summary I Download My CV I أصل عائلة فوده
Profile
Educational Record I Research Activities I Consulting & Teaching I Project Management I Certification & Memberships
-
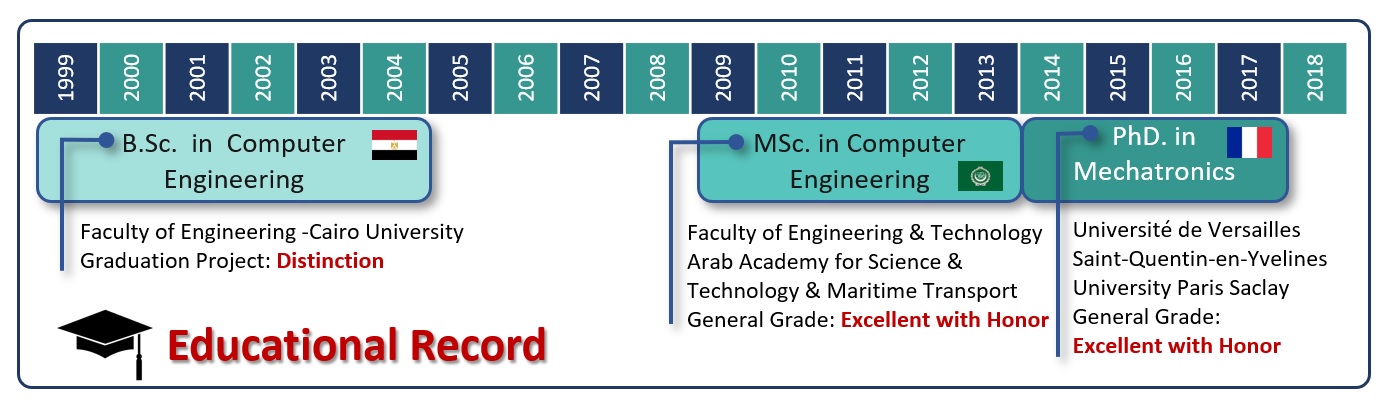
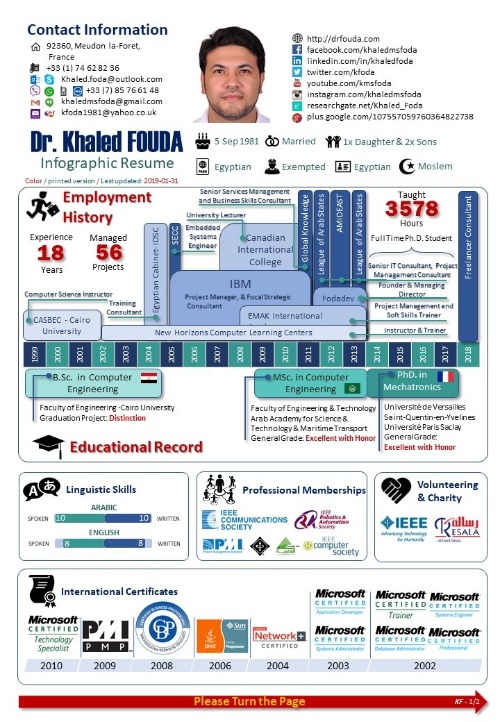
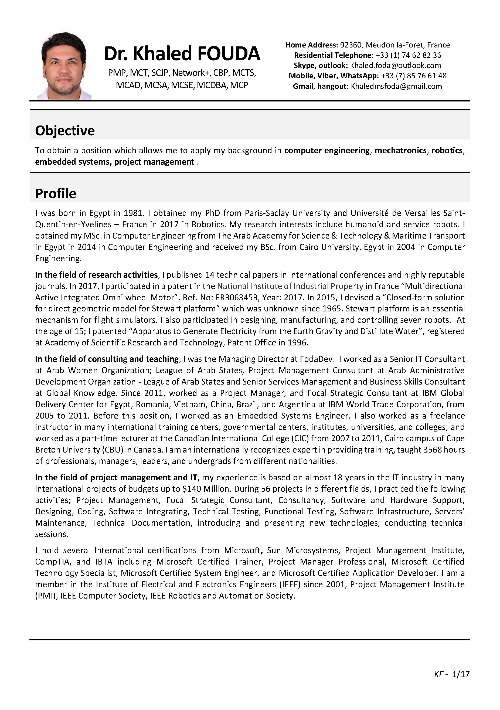
I was born in Egypt in 1981. I obtained my PhD from Paris-Saclay University and Université de Versailles Saint‐Quentin‐en‐Yvelines – France in 2017 in Robotics. My research interests include humanoid and service robots. I obtained my MSc. in Computer Engineering from The Arab Academy for Science & Technology & Maritime Transport in Egypt in 2014 in Computer Engineering and received my BSc. from Cairo University, Egypt in 2004 in Computer Engineering.
-
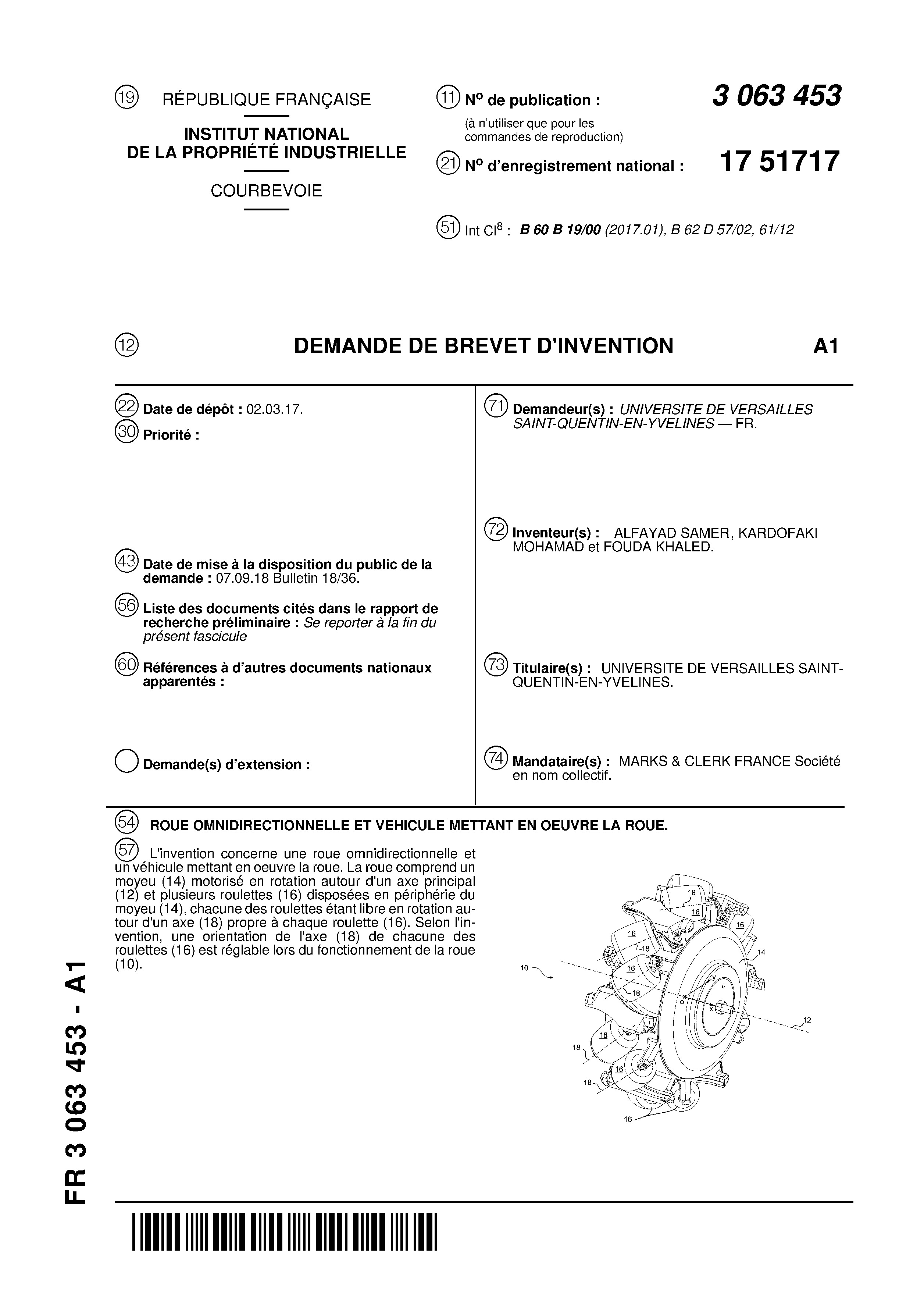
In the field of research activities, I published 14 technical papers in international conferences and highly reputable journals. In 2017, I participated in a patent in the National Institute of Industrial Property in France “Multidirectional Active Integrated Omni wheel Motor”. Ref. No: FR3063453, Year: 2017. In 2015, I devised a “Closed-form solution for direct geometric model for Stewart platform” which was unknown since 1965. Stewart platform is an essential mechanism for flight simulators. I also participated in designing, manufacturing, and controlling seven robots. At the age of 15; I patented “Apparatus to Generate Electricity from the Earth Gravity and Distillate Water”, registered at Academy of Scientific Research and Technology, Patent Office in 1996.



-
In the field of consulting and teaching, I was the Managing Director at FodaDev. I worked as a Senior IT Consultant at Arab Women Organization; League of Arab States, Project Management Consultant at Arab Administrative Development Organization – League of Arab States and Senior Services Management and Business Skills Consultant at Global Knowledge. Since 2011, worked as a Project Manager, and Focal Strategic Consultant at IBM Global Delivery Center for Egypt, Romania, Vietnam, China, Brazil, and Argentina at IBM World Trade Corporation, from 2005 to 2011. Before this position, I worked as an Embedded Systems Engineer. I also worked as a freelance instructor in many international training centers, governmental centers, institutes, universities, and colleges, and worked as a part-time lecturer at the Canadian International College (CIC) from 2007 to 2011, Cairo campus of Cape Breton University (CBU) in Canada. I am an internationally recognized expert in providing training, taught 3568 hours of professionals, managers, leaders, and undergrads from different nationalities.



-
In the field of project management and IT, my experience is based on almost 18 years in the IT industry in many international projects of budgets up to $140 Million. During 56 projects in different fields, I practiced the following activities; Project Management, Focal Strategic Consultant, Consultancy, Software and Hardware Support, Designing, Coding, Software Integrating, Technical Testing, Functional Testing, Software Infrastructure, Servers’ Maintenance, Technical Documentation, introducing and presenting new technologies, conducting technical sessions.



-
I hold several International certifications from Microsoft, Sun Microsystems, Project Management Institute, CompTIA, and IBTA including Microsoft Certified Trainer, Project Manager Professional, Microsoft Certified Technology Specialist, Microsoft Certified System Engineer, and Microsoft Certified Application Developer. I am a member in the Institute of Electrical and Electronics Engineers (IEEE) since 2001, Project Management Institute (PMI), IEEE Computer Society, IEEE Robotics and Automation Society.



Employment History
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

-
2011 –2013
Founder & Managing Director
FodaDev LLC. – Cairo, Egypt
Responsibilities: Formulating and successfully implementing Fodadev policy. Directing strategy towards the profitable growth and operation of Fodadev. Developing strategic operating plans that reflect the longer-term objectives and priorities established by the board. Putting in place adequate operational planning and financial control systems. Ensuring that the operating objectives and standards of performance are not only understood but owned by the management and other employees. Closely monitoring the operating and financial results against plans and budgets. Taking remedial action where necessary and informing the board of significant changes. Maintaining the operational performance of Fodadev. Monitoring the actions of the functional board directors. Assuming full accountability to the board for all Fodadev operations. Representing the company to major customers and professional associations. Building and maintaining an effective executive team.
-

2007 –2011
University Lectures
CIC – Canadian International College – Cairo, Egypt
Responsibilities: As a lecturer, I conduct weekly teaching sessions, lectures, assign and grad projects, exercises and assess the progress of students, supervising undergraduate projects, and graduation projects, Grading the final and midterm exams.
-

2005 –2011
Project Manager
IBM World Trade Corporation – Cairo, Egypt
Responsibilities: Project Management, Consultancy, Focal Strategic Consultancy for Egypt, Romania, Vietnam, China, Brazil, and Argentina, Team Leading, Software Support Designing, Coding, Software Integrating, Technical Testing, Functional Testing, Software Infrastructure, Servers’ Maintenance, Technical Documenting, Introducing and Presenting new technologies, Conducting technical sessions.
Positions History: Focal Strategic Consultant, Mobilization Manager, Project Manager, IBM Rational Consultant, Embedded Software Engineer, Associate Software Engineer.
-

2008 –2013
Project Management and Soft Skills Instructor
EMAK International Academy – Cairo, Egypt & Kuwait.
Responsibilities: Teach the core business skills required for the young Business Professionals; which covers these curriculums: Leadership, Business Communication, Business Etiquette, and Customer Services.
-

2005
Embedded Systems Developer
Software Engineering Competence Center – SECC Cairo, Egypt
Responsibilities: Project Coordinating, Hardware Designing, and Introducing and Presenting new technologies.
-
2012 –2013
Project Management Instructor
New Horizons Computer Learning Centers – Cairo, Egypt
Responsibilities: Teach Project management course.
-

2012 –2013
Project Management Instructor
AMIDEAST- Cairo, Egypt, Tunisia
Responsibilities: Teach PMP exam preparation course.
-

2013
Project Management Instructor
Arab Administrative Development Organization – League of Arab States – Cairo, Egypt
Responsibilities: Teach Project management course.
-

2011
Senior IT Consultant
Arab Women Organization – League of Arab States – Cairo, Egypt
Responsibilities: Supervise the IT team of the AWO, consult them in the development and in the backup procedures, schedule a weekly meeting with the team, and write a report at the end of this period about the performance of each team member and all the requirements to enhance the performance of the IT department.
-

2011
Senior Services Management and Business Skills Consultant
Global Knowledge – Cairo-Egypt, London-UK, Riyadh- Saudi Arabia, Dubai-UAE
Responsibilities: delivered IT, project management, ITIL courses -

2004 –2005
Computer Network Instructor
The Egyptian Cabinet, Information and Decision Support Center, the Electronic Business Institute – Cairo, Egypt
Responsibilities: Teaching MCSE complete track.
-

2013
Project Management Instructor
Egabi- Cairo, Egypt
Responsibilities: Teach PMP exam preparation course.
-

1999 –2002
Computer Science Instructor
Center for Advanced Software & Biomedical Engineering Consultation – CASBEC Cairo University – Cairo, Egypt
Responsibilities: Instructing, Preparing materials and exams, Labs setup and infrastructure, Maintenance.
Educational Record
PhD. in Robotics

MSc. in Computer Engineering

B.Sc. in Computer Engineering

Sep. 1984 – May 1998
La Rose De Lisieux Language School
Egypt
General Secondary Certificate Percent 98.2%
PhD Research Summary
PhD. in Robotics
Oct. 2013 – Dec. 2017

Paris-France
Laboratoire D’Ingénierie Des Systèmes De Versailles
Université De Versailles Saint‐Quentin‐En‐Yvelines
Université Paris Saclay

Thesis Title: “Testing Machine for Transtibial and Transfemoral Prosthesis”
Abstract
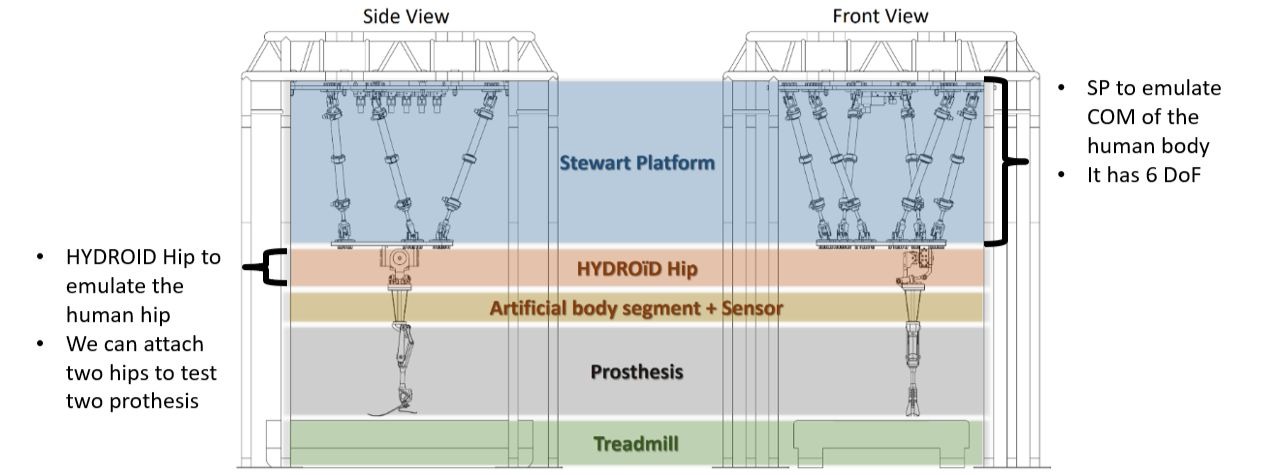
The objective of this work is to build a testing machine for prosthesis. The machine should be able to reproduce the same dynamic and kinematics conditions applied on the prosthesis during the normal use.
Numbers of amputation and causes of amputation were collected. Different types of prosthesis were classified according to the leg prosthesis per amputation height, passive and active prosthesis, differentiated by the nature of their actuator. Most of the testing machine for the prosthesis were studied form the technological and capability prospective. Determining all the limitations of most of existing testing machines, and the needs to develop a new machine to full fill these needs were developed.
Then we studied and analyzed the dynamics of the human gait and run. The equations of motion by taking into consideration the masses and moments of inertia of skeletal segments. Most of the parameters of gait were extracted. In conclusion, we have the kinematic requirements of the human center of gravity to generate 6 DOF that the testing machine should carry out to emulate the normal human gait and run.
Three designs were proposed to implement the testing machine; Articulated robot arm, Cartesian manipulator, and Stewart Platform (SP). After implementing the three solutions we found the most suitable solution is the SP attached with it an artificial active hip. We have chosen the hydraulic power as it is the most suitable actuation technique for our solution knowing the required actuation forces.
To help in controlling the SP motion, a novel Closed-form solution of direct Geometric model for planer and 6-6 Stewart Platform using the rotary sensors instead of liner sensors as wanted to the hydraulic actuators was developed. Sensitivity analysis was studied for that solution, and analytical calculation for computing the workspace was also developed.
The conclusion from this testing machine is that we can create all the dynamics of the human body, i.e. walking or running or going up and down stairs. The developed solution can carry testing procedures for either passive or active prothesis
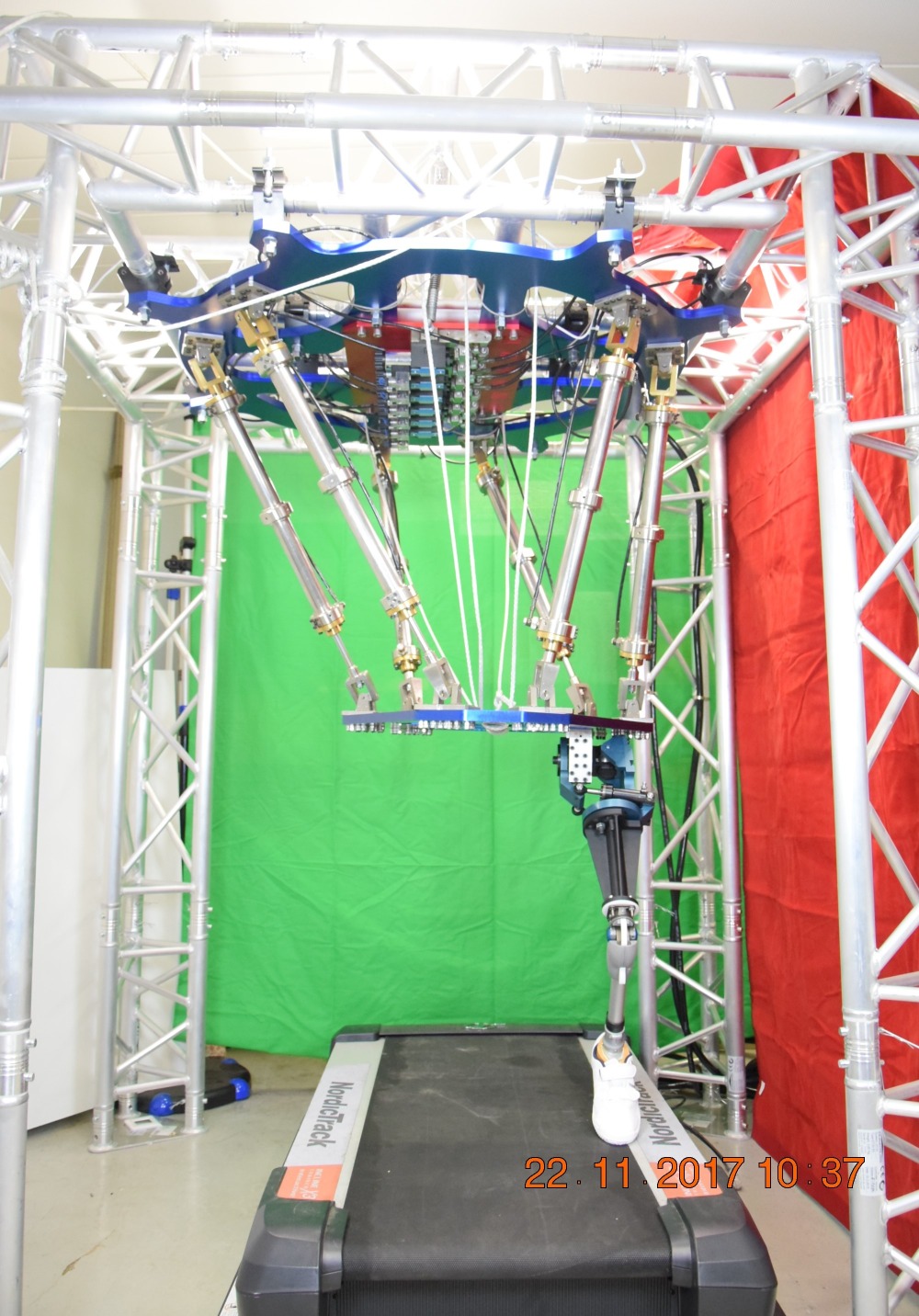
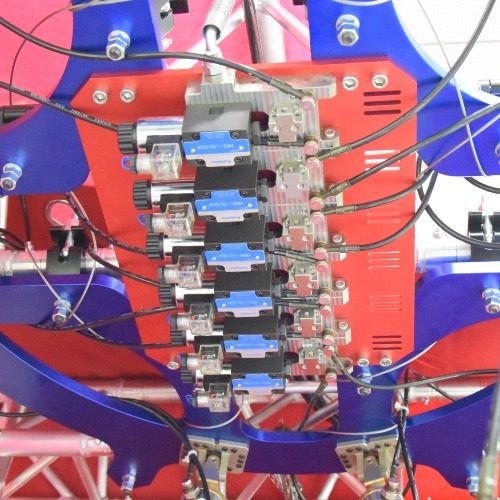
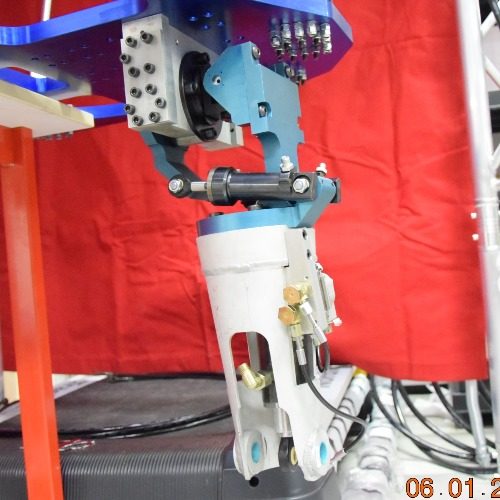
Realization of Testing Machine for Transtibial and Transfemoral Prosthesis
Upper universal Joint

Stainless steel Hydraulic cylinder

Lower universal joint

Hydraulic Manifold System
Prosthesis tested by PTM
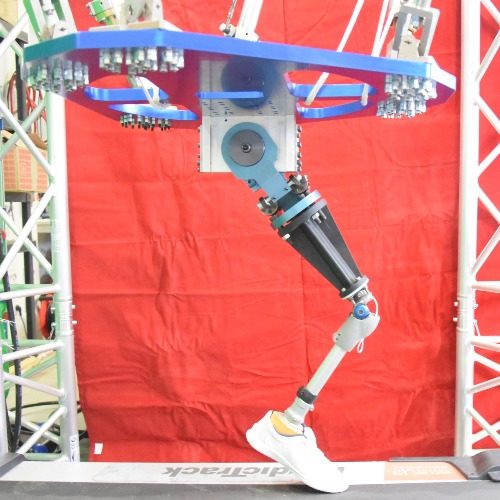
HYDROïD Hip
Simulation of Testing Machine for Transtibial and Transfemoral Prosthesis
Check the presentation of my thesis
-

Professeur Olivier Bruneau
Université Paris-Saclay – LURPA ENS Paris-SaclayPrésident

Professeur Yannick Aoustin
Université de NantesRapporteur

Professeur Luige Vladreanu
Institute of Solid Mechanics, Romanian AcademyRapporteur

Dr. Xavier Bonnet
Maître de Conférence, Arts et Métiers ParisTechExaminateur

Dr. Eric Le Carpentier
Maître de Conférence, Ecole Centrale de NantesExaminateur

Professeur Fethi Ben Ouezdou
Université Paris-Saclay – UVSQ (LISV)Directeur de thèse

Dr. Samer AlFayad
Université Paris-Saclay – UVSQ (LISV)Co-Directeur de thèse
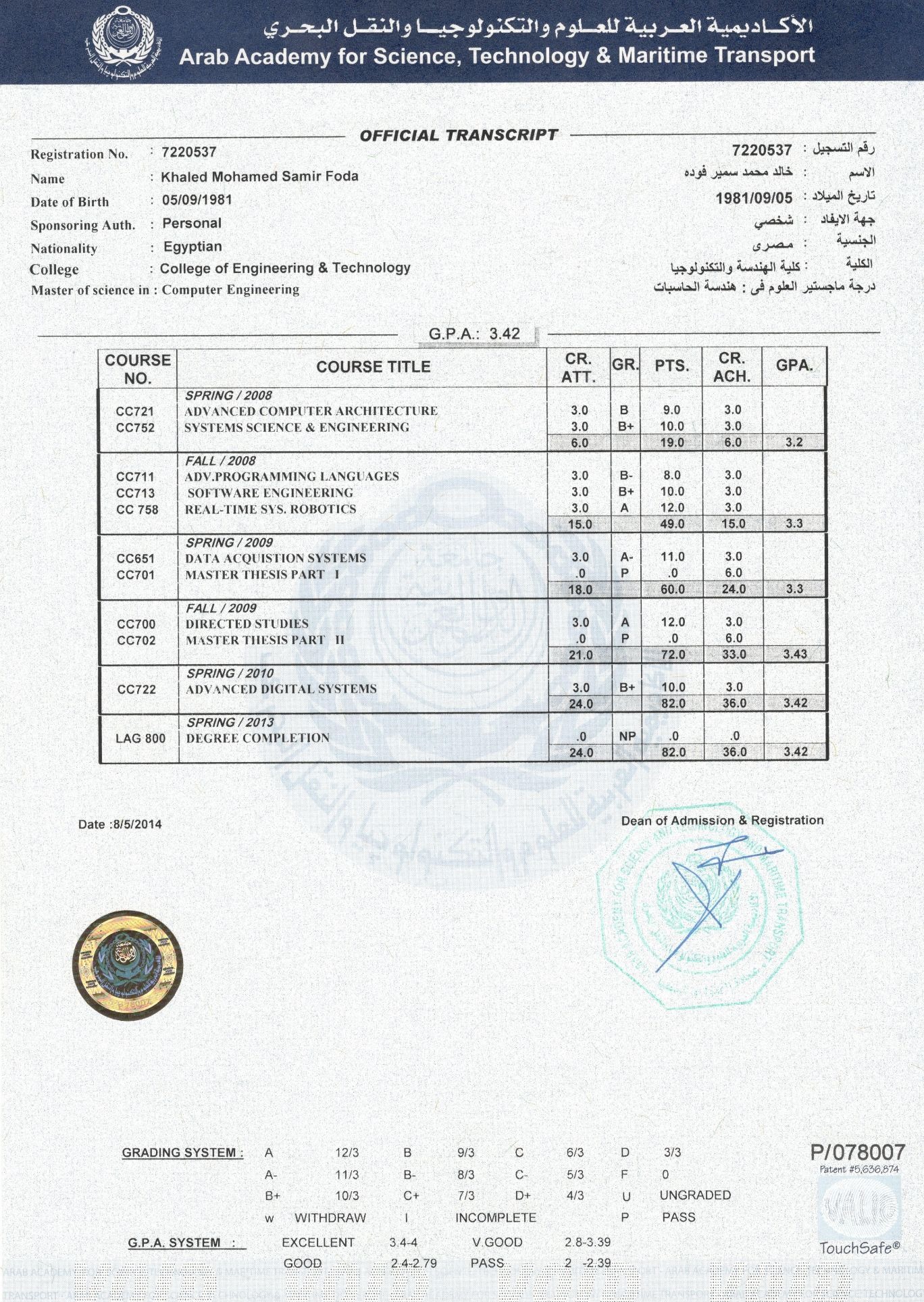
Master’s Research Summary
MSc. in Computer Engineering
Mar. 2008 – Apr. 2014
 Cairo Egypt
Cairo Egypt
Faculty Of Engineering & Technology – Arab Academy For Science & Technology & Maritime Transport
General Grade: Excellent With Honor
GPA: 3.42 on a 4.0 scale
Thesis Title: “Embedded System Architecture of Mobile Electronic Arabic Braille Panel for Reciting the Holly Qur’an (Rasm Al-’Uthmani)”
Abstract
This thesis concerns with reorganizing new Braille symbols to represent all the diacritics in the Arabic Quran, the aim of this study is building a system that translates the Quran verses to Qur’anic code, then extracting all similar patterns of variable lengths using enhanced (Lempel, Ziv, and Welch) LZW data Compression technique, creating an embedded search engine based on microcontroller that enable the user to select the soura, ayah, goz’, hizb, page, or line to read. We will use the display control circuit due to complexity in showing sequence of Braille character, and (Multi Media Card) MMC card as a storage media. This embedded system can switch between Egyptian or Saudi Braille system.

Check the presentation of my thesis
Jury committee

Prof. Dr. Ahmed Fahmy
Chair Computer Engineering Department AASTMT College of Engineering and Technology in Cairo

Prof. Dr. Yousry El-Gamal
Former Minister of Education for Egypt

Prof. Dr. Nevin Darwish
Chair Computer Engineering Department Faculty of Engineering at Cairo University

Prof. Dr. Khaled Shehata
Dean of AASTMT College of Engineering and Technology in Cairo

Dr. Hanady Hussien
Head of Education planning at Arab Academy for Science, Technology and Maritime Transport
Graduation Project
B.Sc. in Computer Engineering
Sep 1998 – May 2004
Cairo Egypt
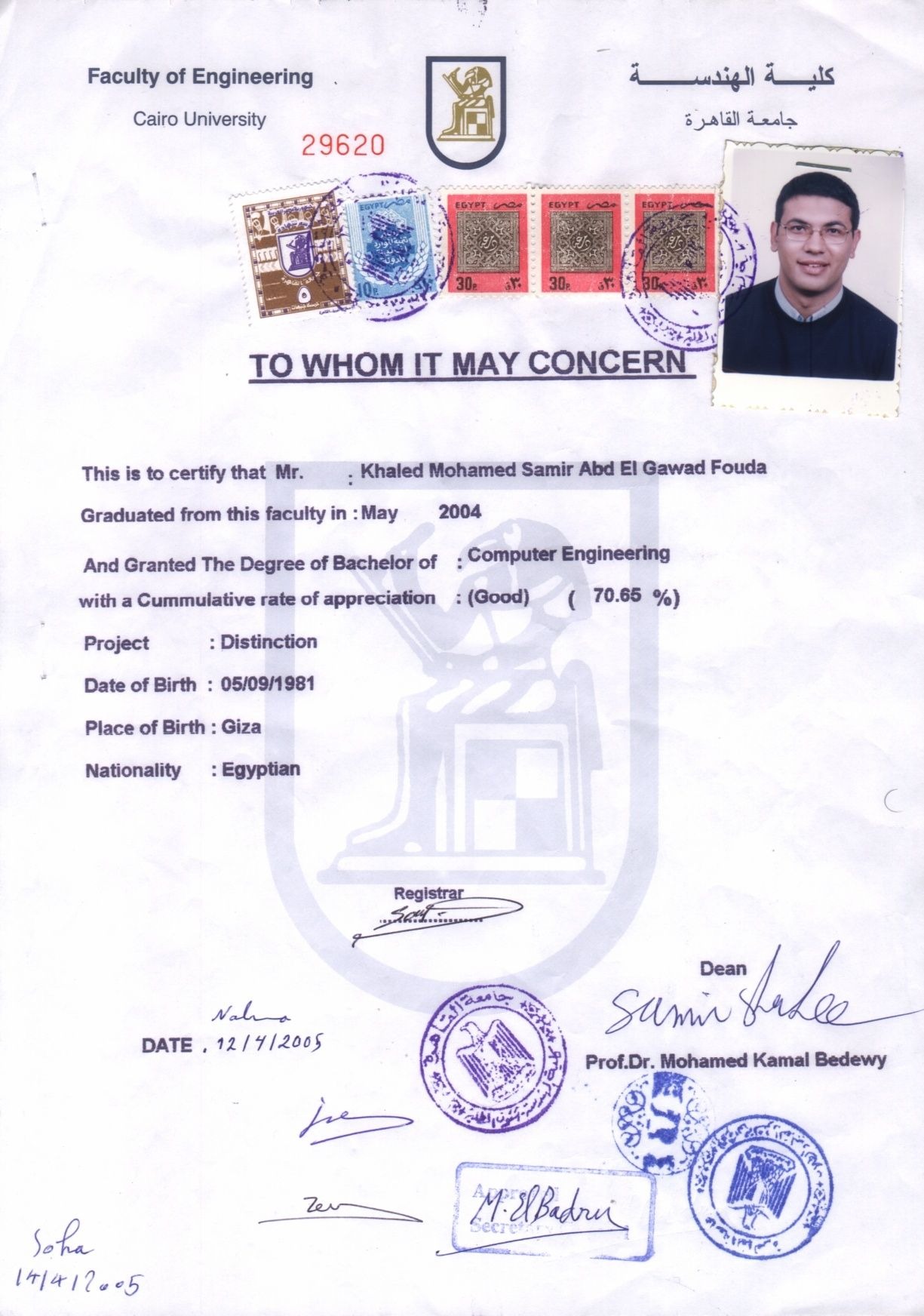
Faculty of Engineering – Cairo University
Graduation Project Grade: Distinction
GPA: 3.28 on a 4.0 scale

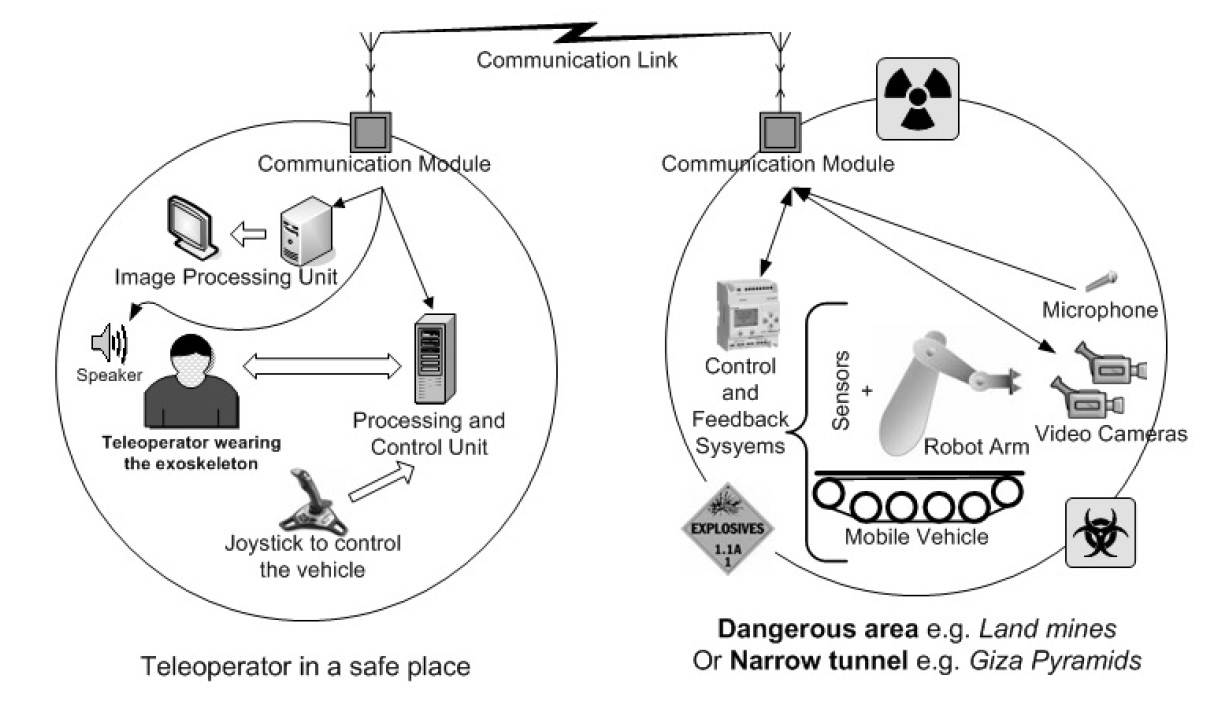
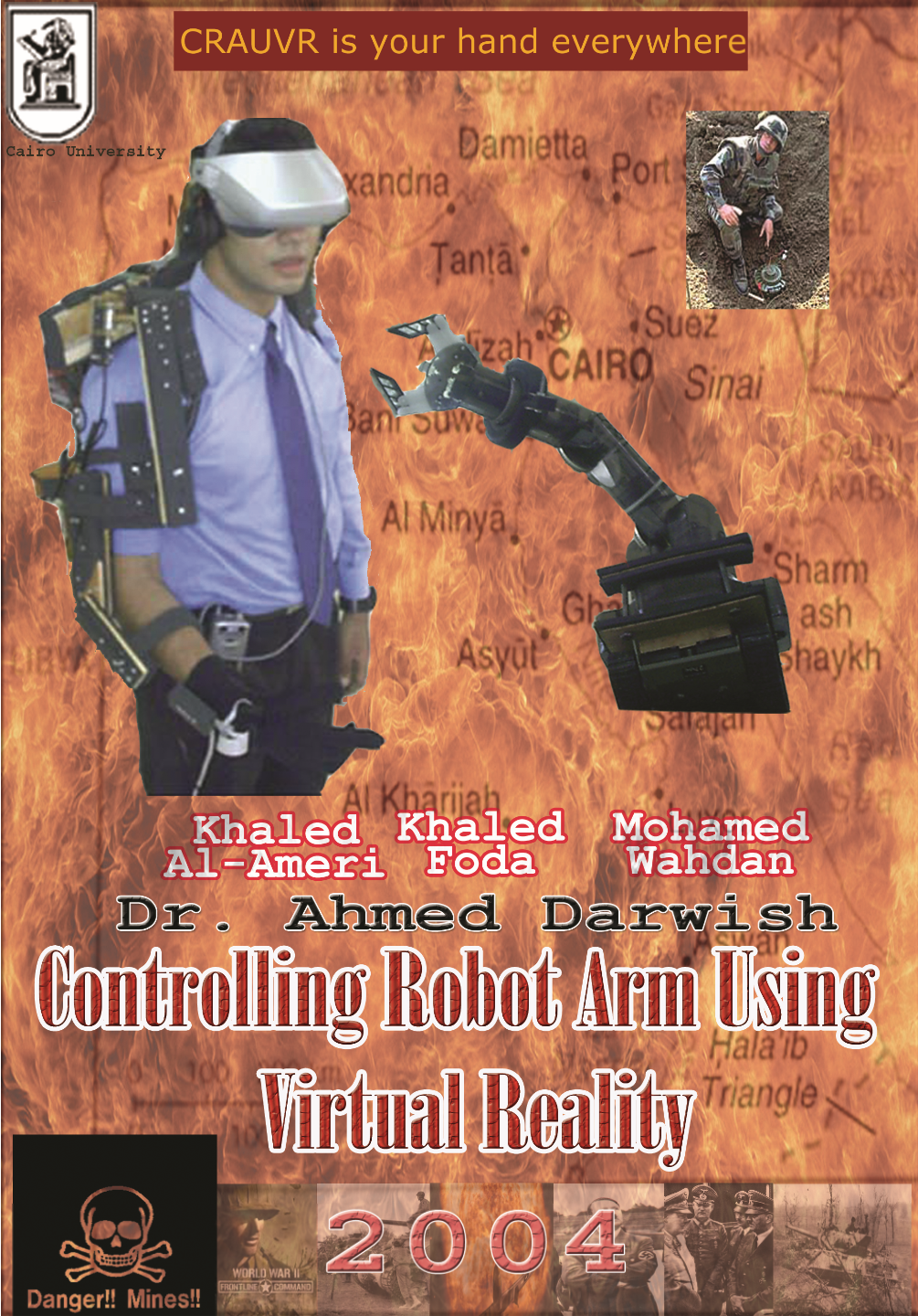
Title: ” Controlling a Robot Arm Using Virtual Reality” (CRAUVR) “
CRAUVR Is Your Hand Everywhere
Abstract
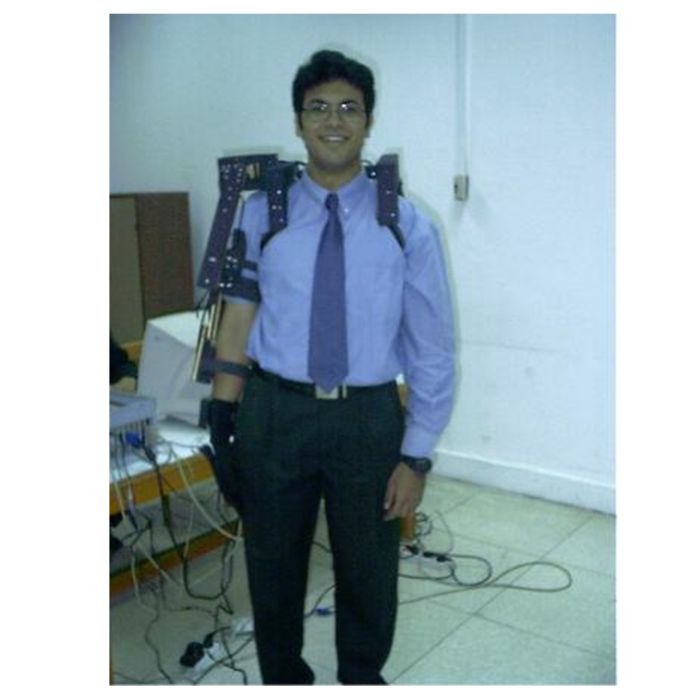
I have participated in “Controlling a Robot Arm Using Virtual Reality” where we designed and executed robot control system and most of the virtual reality parts such that robot arm simulates exactly the movement of the human arm and with very high precision. This project has many applications and from the most important ones are the following: Removing the land mines from the western desert by controlling the robot arm remotely, where the user is in totally safe place, far away from any danger and controls the robot which will enter the mines fields to extracted without explosion. If any mine exploded suddenly as expected from an iron mine being exposed to the rain and to the hot of the desert sun from more than 50 years, it will explode in a cheap robot that costs 700 EGP. We can say that we saved human’s life or human who is possibly lose a part of his body with 700 EGP ONLY.
Teleoperator

Mobile Robot
Demo of Controlling a Robot Arm Using Virtual Reality
Applications

Getting the mines from the desert remotely

Operate a remote Surgery between the capital and a submarine

Exploring the Egyptian pyramids
Media
Presented this project in many TV shows on more than 9 satellite channels, e.g. Nile News Channel, Mehwar Channel, Nile Educational Channels and others. Many national and international newspapers published some articles about that project
Mehwar TV Channel
Sout El-Gamaa - page 8 date: 29-03-2005

Al-Ahram Newspaper- page 13 date: 12-08-2004

Similar projects done after CRAUVR
The German Army model is equipped with five cameras and a double shot disruptor type Richmond RE70.


Researchers at the Korea Institute of Science and Technology, in Seoul, created an exoskeleton master arm that can control a humanoid robot's arms.

Jury committee & Team members
Prof. Dr. Ahmed Darwish

Supervisor
Former Minister of State for Administrative Development for Egypt
Prof. Dr. Gamal Aly

Examiner
Senior Consultant at Ministry of Communication and Information Technology Technology and Communications
Prof. Dr. Salwa Nassar

Examiner
Head of Computer Systems Department, Electronics Research Institute
Khaled Al-Ameri

Team member
Khaled M.S. Fouda

Team member
Mohamed Wahdan

Team member
Publications & Patents
-
2007
Khaled M.S. Foda, Mohamed H. Wahdan, Khaled A. Al-Ameri, Ahmed M. Darwish: Controlling a robot arm using exoskeleton for land-mines disposal. Computer Engineering & Systems, 2007. ICCES ’07. International Conference on; 12/2007, DOI:10.1109/ICCES.2007.4447020
-
- KARDOFAKI Mohamad, FOUDA Khaled, ALFAYAD Samer: Design of an Active Integrated Omni Wheel Motor for Holonomic Mobile Platforms.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Closed-form solution of Direct Geometric for Planar Stewart Platform.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Analytical Workspace of Planar Stewart Platform.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Closed-form solution of Direct Geometric for 6 DOF Stewart Platform.
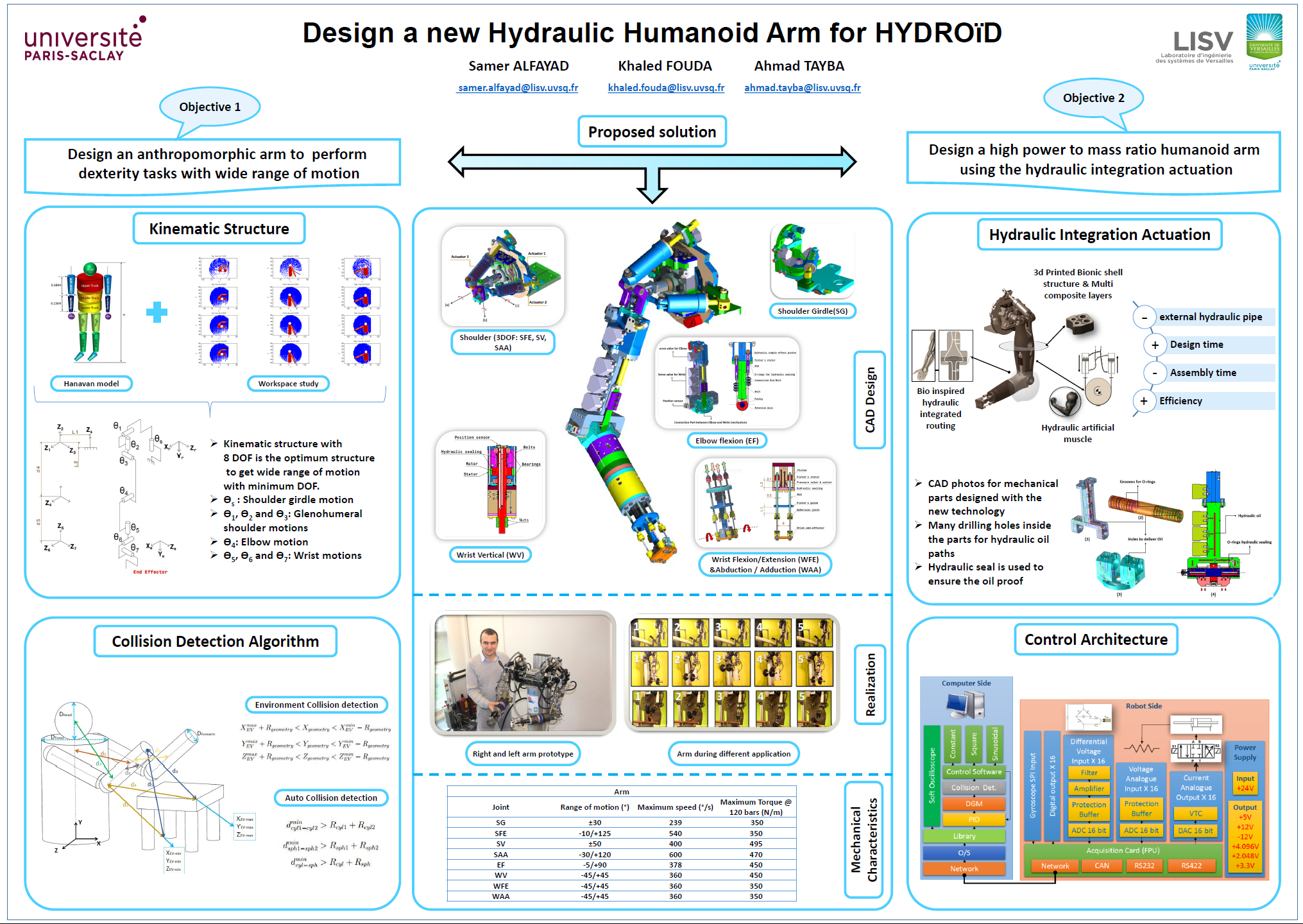
- Samer Alfayad, Fouda, Khaled., Ahmad Tayba: An Integrated Hydraulic Humanoid Robot Arm – Part I: Kinematic Structure, Modeling & Performances Analysis
- Samer Alfayad, Fouda, Khaled., Ahmad Tayba: An Integrated Humanoid Hydraulic Robot Arm – Part II: Prototype Design & Experimental Results
-
-
-
- AlFayad Samer, Kardofaki Mohamed, Fouda Khaled “Multidirectional Active Integrated Omni wheel Motor”. Registered at National Institute of Industrial Property in France No: FR3063453, on 2nd March 2017.
- Fouda Khaled “Apparatus to Generate Electricity from the Earth Gravity and Distillate Water”. Registered at Academy of Scientific Research and Technology, Patent Office on 31st July 1996.
Kindly follow me on Google scholar or on Research gate

Experience

Project Management
I have managed many successful projects in different areas, managed projects of total budget $140 Million.

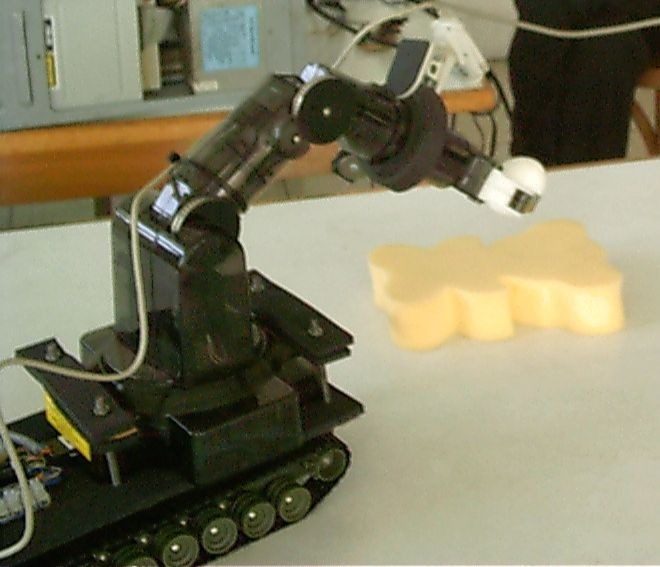
Robotics
I have participated in designing and manufacturing, assembling many robots. Either mobile or fixed robots.

Providing Training
Taught more than 3578 teaching hours, at 28 international training centers, governmental centers, universities, and colleges.
Manage Computer Training Centers
I have been member of the board of management of Resala training centers, Interviewing and Evaluating more than 200 instructor and employee.

Automating Portfolio Management
I have worked in deploying IBM® Rational® Portfolio Manager in IBM Cairo Technology Development Centre.

Telematics
I have worked in the CERT-IBM telematics project, in what is described by Information Week as the largest telematics deal in history of budget $125 Milion.


Embedded Systems for Automotive
I have worked in joint project between IBM and Valeo.

Computer Networks
Design, Installation, and Administration
Lab Establishment
I have participated in establishment of two labs, electronic and PCB FAB labs aimed to help in development of robots.
Robotics & Mechatronics Experiences
HYDROïD Arm
I have participated in electronic hardware and software development of the HYDROïD arm & head. Participated in creating many demos. This Project was under supervision of Dr. Samer Alfayad. This Arm was desided by Dr. Samer Alfayad

Demo 1
Demo 2
Demo 3
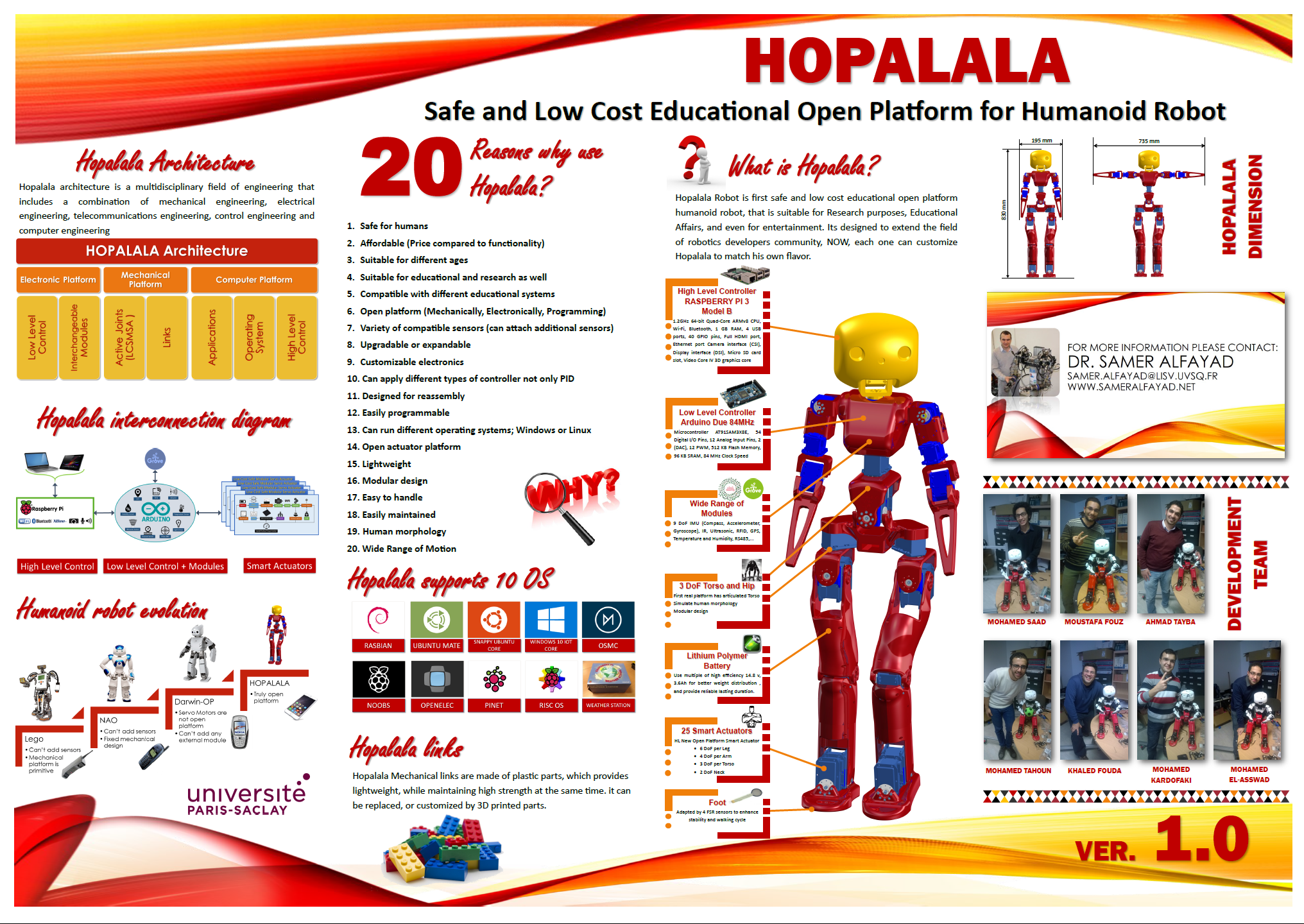
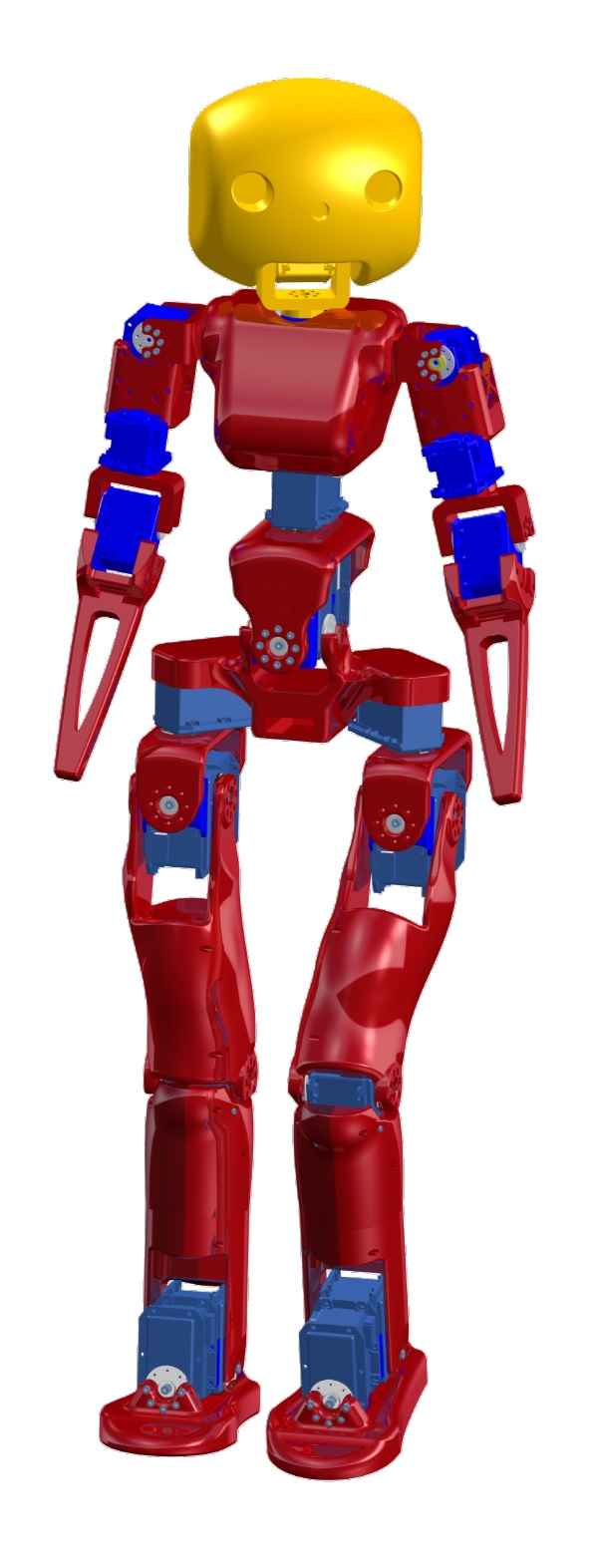
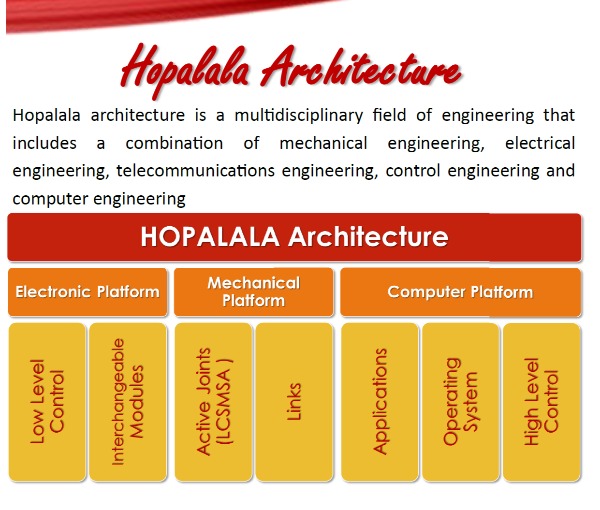
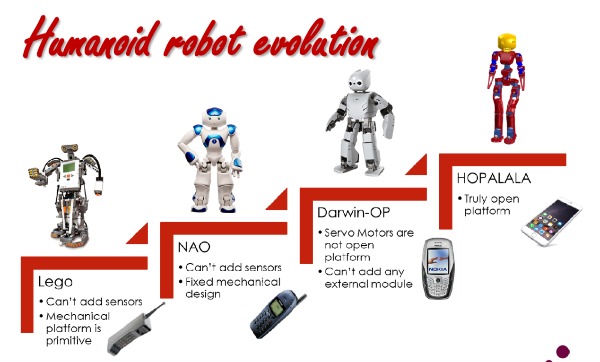
Hobalala
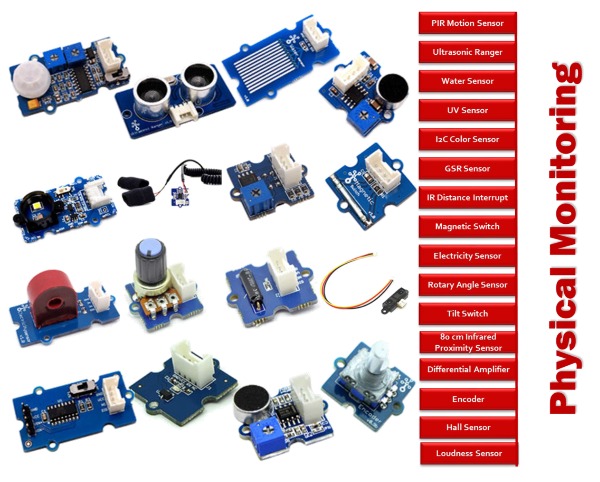
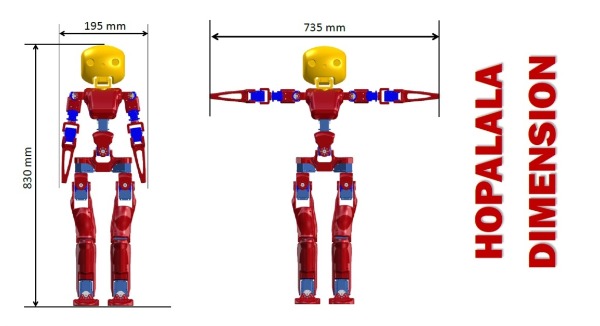
I have participated in developing Safe and Low Cost Educational Open Platform for Humanoid Robot, it can be customized from the mechanical, electrical, sensors, and programming perspectives. It consists of 25 DOF.
This Project was under supervision of Dr. Samer Alfayad.



1. Safe for humans
2. Affordable (Price compared to functionality)
3. Suitable for different ages
4. Suitable for educational and research as well
5. Compatible with different educational systems
6. Open platform (Mechanically, Electronically, Programming)
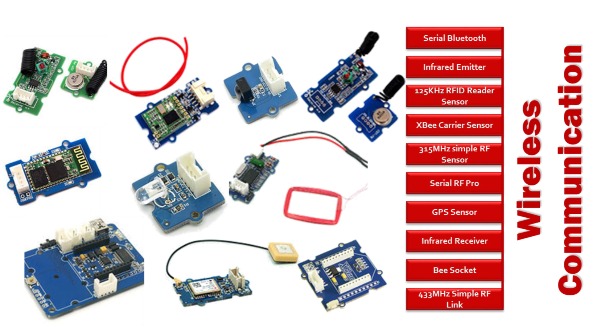
7. Variety of compatible sensors (can attach additional sensors)
8. Upgradable or expandable
9. Customizable electronics
10. Can apply different types of controller not only PID
11. Designed for reassembly
12. Easily programmable
13. Can run different operating systems; Windows or Linux
14. Open actuator platform
15. Lightweight
16. Modular design
17. Easy to handle
18. Easily maintained
19. Human morphology
20. Wide Range of Motion
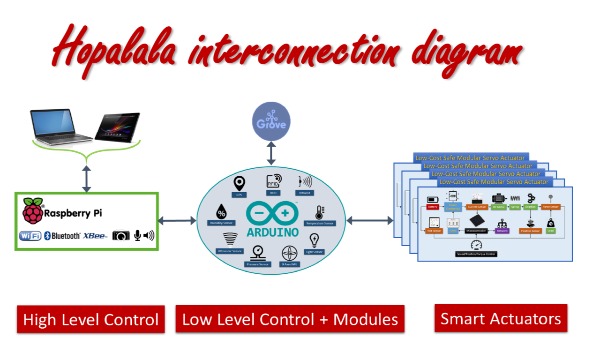
100s OF INTERCHANGABLE MODULES that can be attached to Hopalala


This Project was presented in Icode on 19-05-2016, in SQY Cub Incubator on 08-12-2016, and in other events.


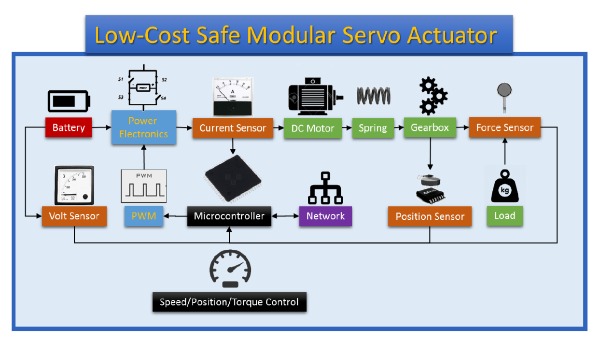
LCSMSA30 & LCSMSA70
I have participated in developing Low Cost Safe Modular Servo Actuators, it consists of Power Electronics Modules, Current sensor, DC motor, Gearbox, Force sensor, volt sensor, Microcontroller, Network, Position sensor. It can be speed/position/torque control.
This Project was under supervision of Dr. Samer Alfayad.
LCSMSA70
LCSMA specifications
MECHANICAL
1. Compact size and shape
2. High power to weight ratio
3. Different sizes for different powers
4. Easy to integrate to the robot
5. Reduced No. of bolts and screw
6. Hard plastic cover
7. engraved slots for heat transfer
8. Reliable Swiss made motors from Maxon
9. Hardened gearbox
VERITY OF SENSORS
1. Contactless Position Sensor with 12 bit resolution
2. Current Sensor
3. Temperature Sensor
4. Voltage Sensor
9. Hardened gearbox
SUPPORTED BY THIRD PARTY SOFTWARE'S
1. Matlab, Simulink, Labview, …etc
2. Facilitate research programs and concluding results
ARDUINO CORE
1. Easy to program
2. Hundreds of examples
3. Enjoy Community development
4. Share development with colleagues
COMPLETELY PROGRAMMABLE
1. Can apply different algorithms
2. Enable/ disable functions
3. Control external modules
CONNECTED IN DAISY CHAIN
1. By use of RS485 communication protocol
2. Reduce cabling
3. Increase Robustness
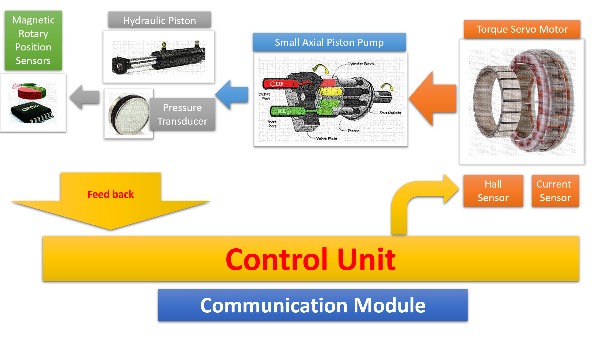
Romeo-2
In this research project, we are presenting new design principle of the humanoid robot’s arm; which is mixing the electric actuators with the hydraulic technology. In ROMEO, one arm will be completely actuated by electric motors which are very fast but has limited torque, and on the other arm, the elbow only will be actuated by compact hydraulic system which has very high torque capabilities.
I have participated in developing the controller and the driver of the motor that drive the hydraulic bump.
This Project was under supervision of Dr. Samer Alfayad.

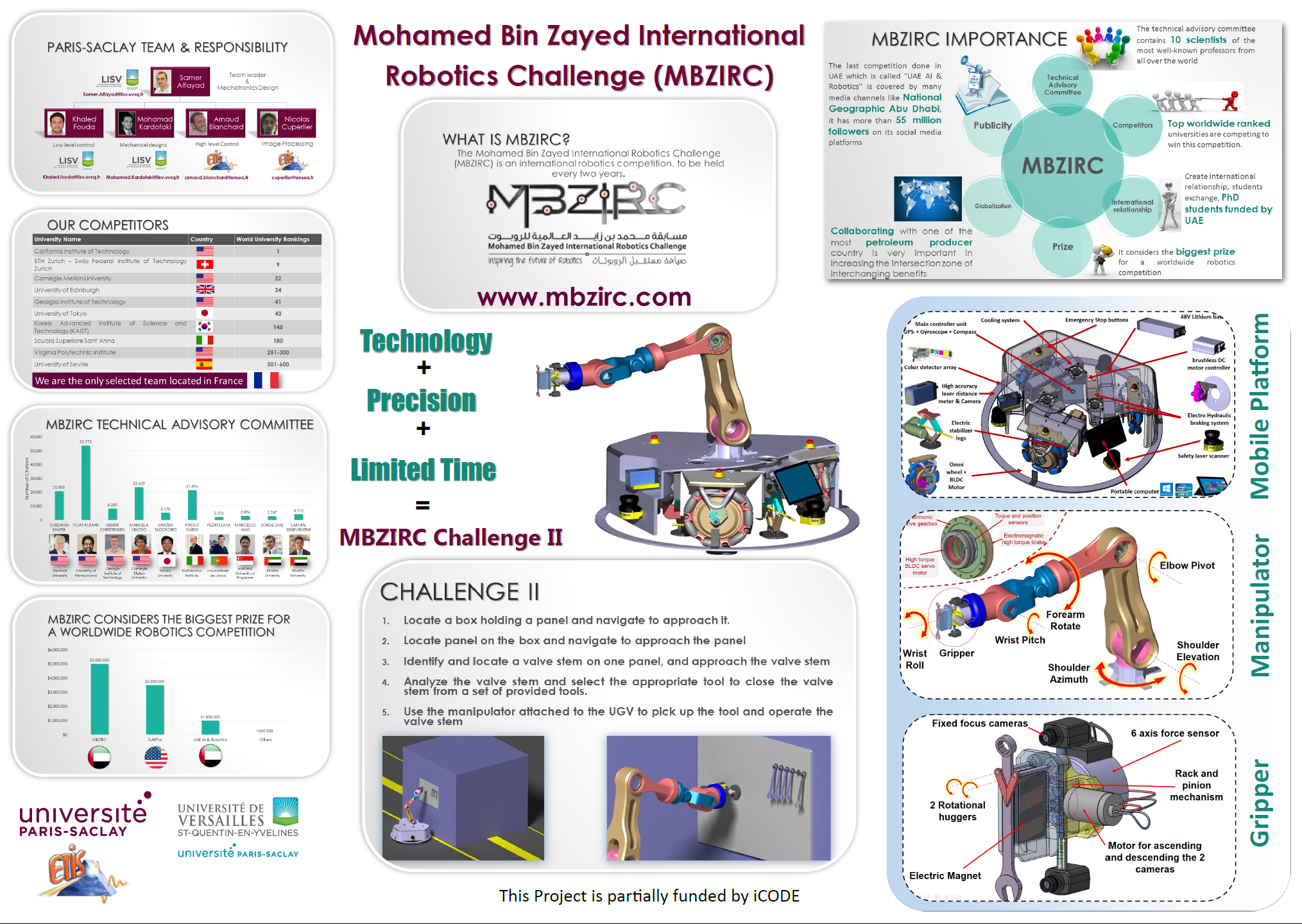
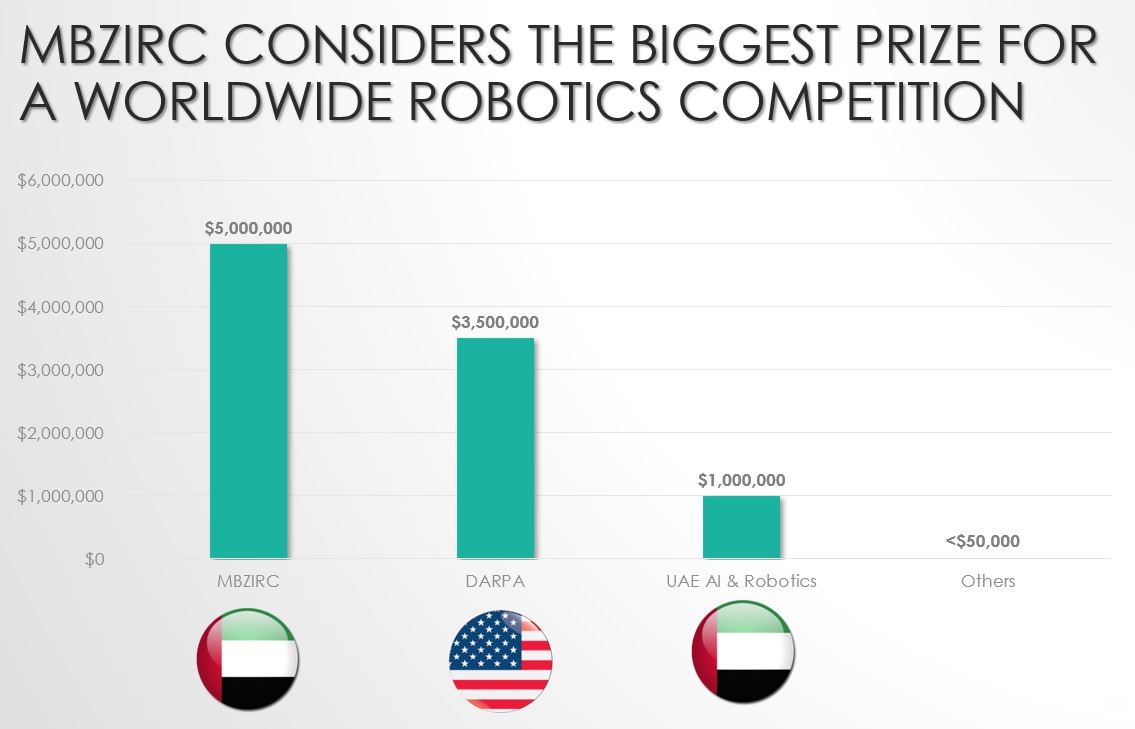
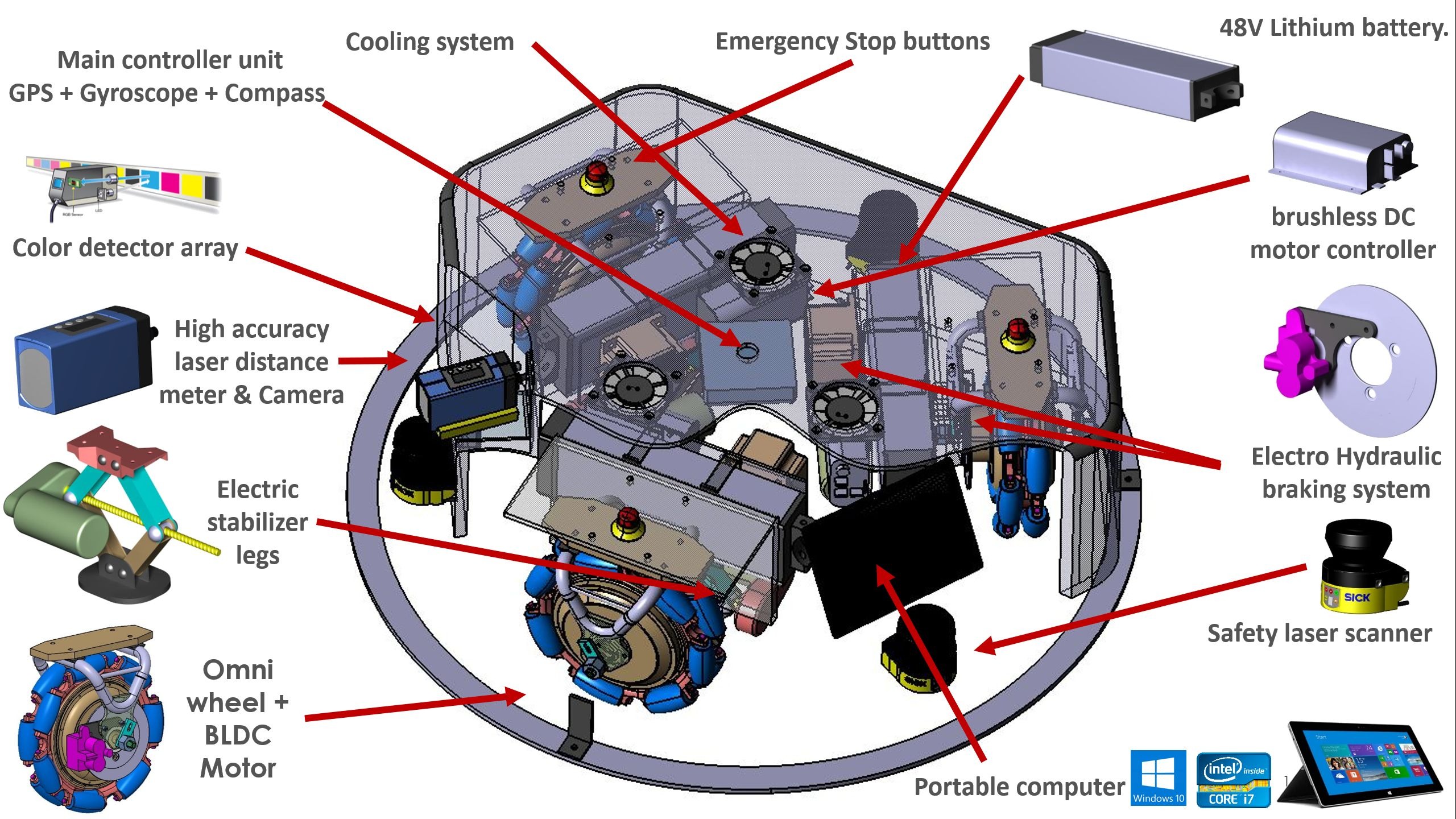
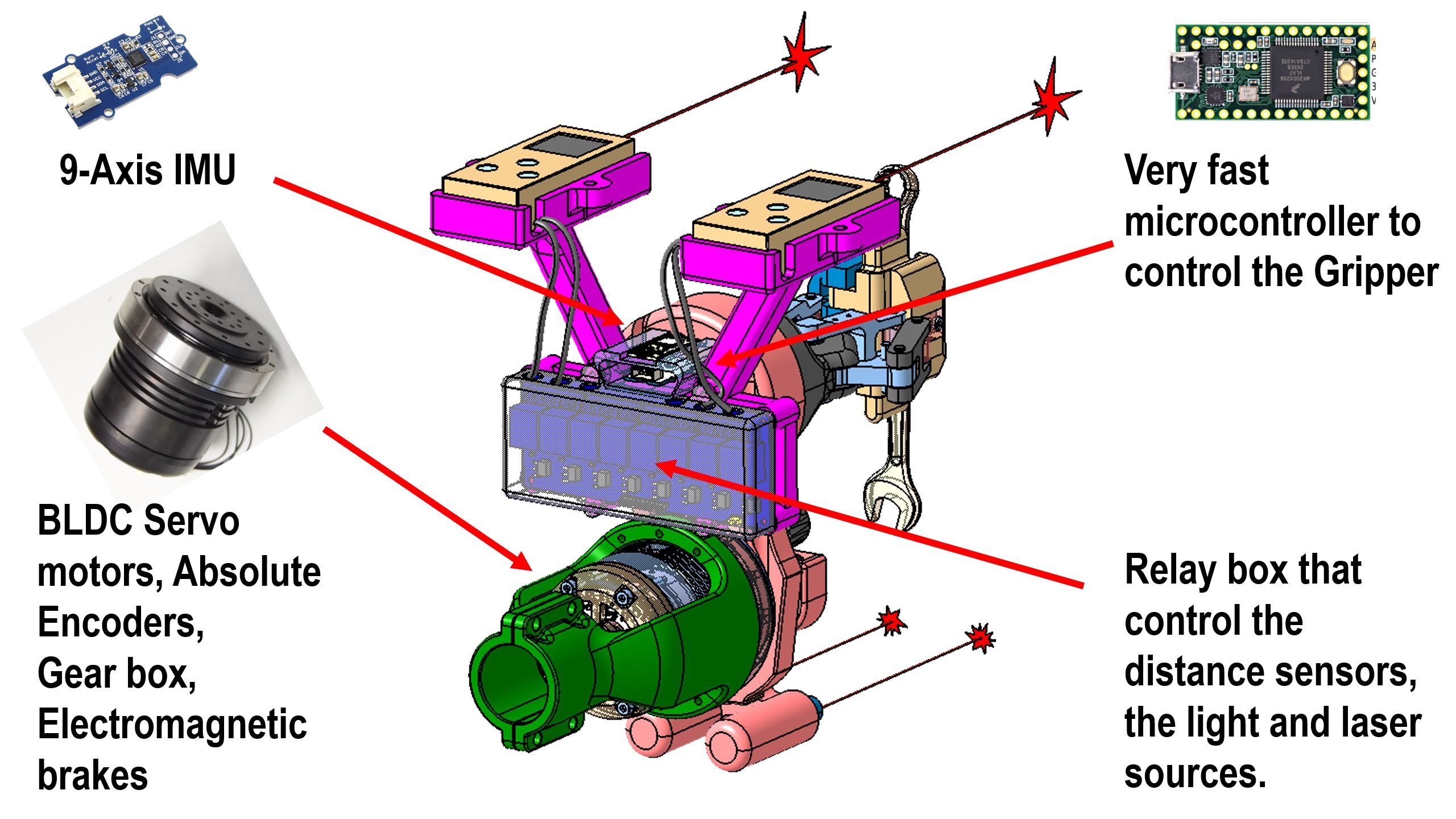
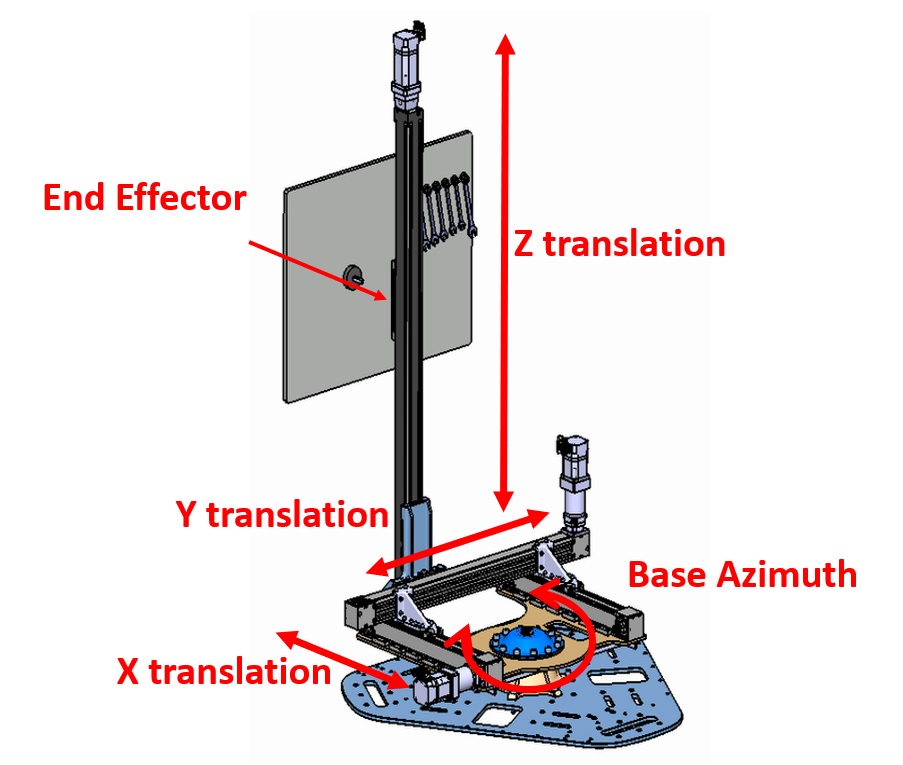
International Robotics Competitions Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017

I have participated in MBZIRC-2017 (Abu Dhabi) under Paris-Saclay University which was ranked as 9/143 all over the world.
My role is the System Architect.
We were the ONLY team qualified from France.
- What is MBZIRC
- Demo Videos
- Team Members
- Certificates of Achievement
- Holonomic Mobile base
- 6-DOF Articulated Robot Arm
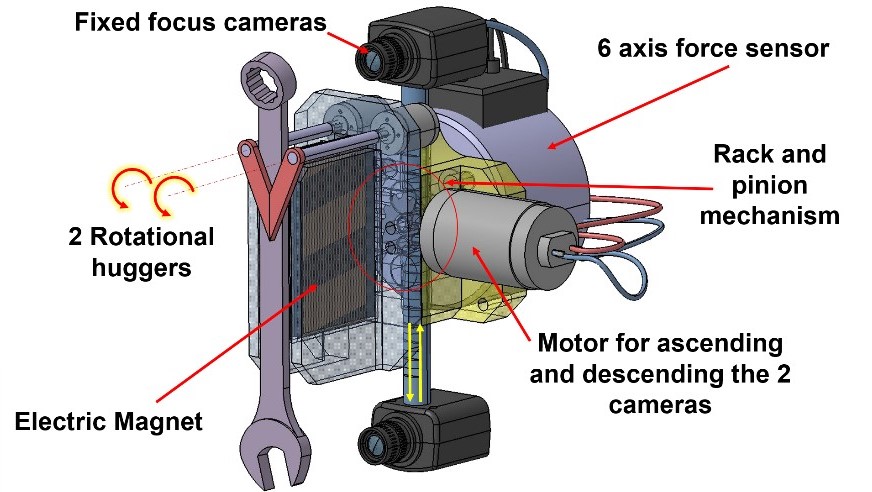
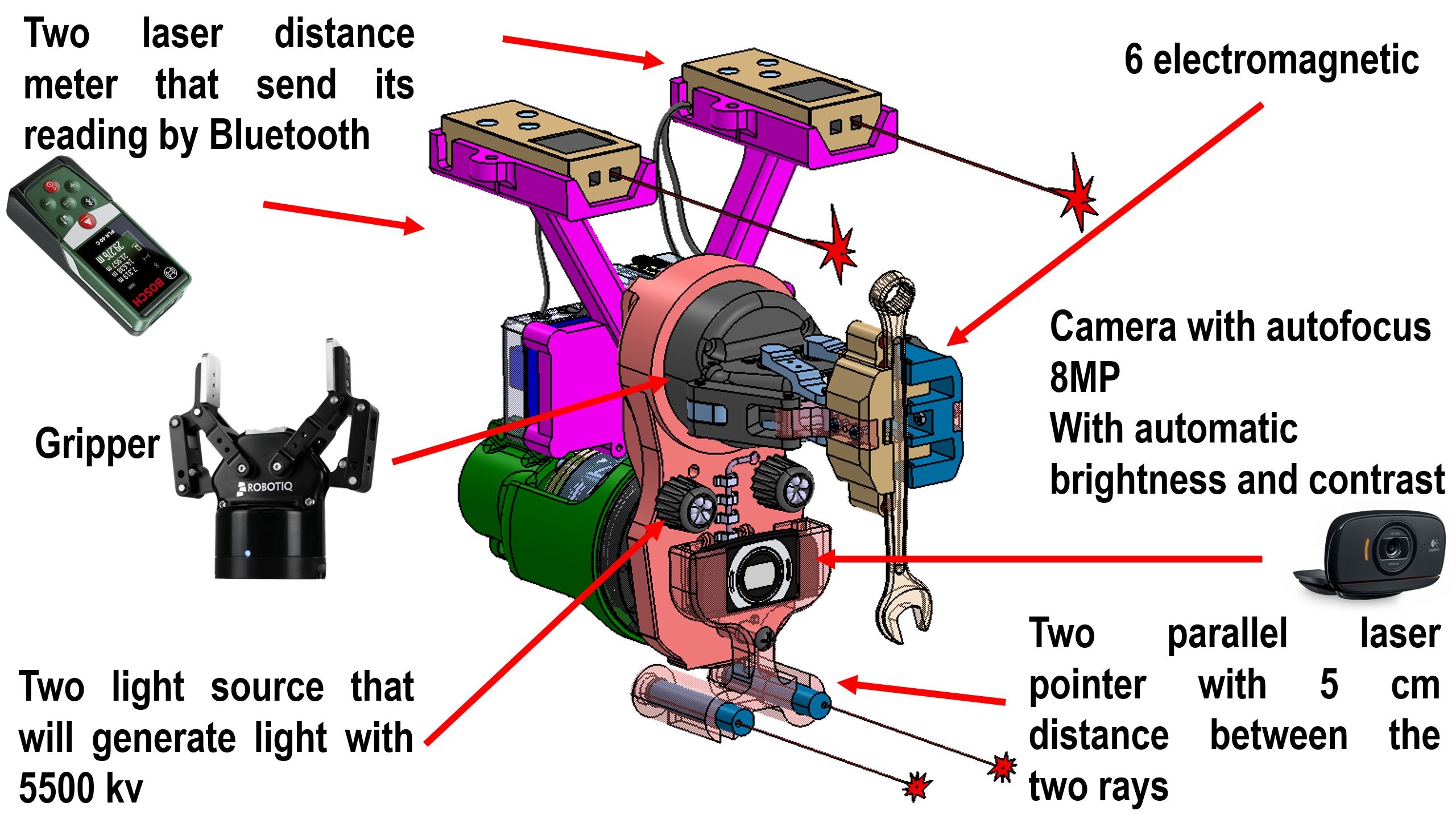
- Smart Gripper V1, V2
- Image Processing Algorithms
- Cartesian Robot Manipulator
- TECHNICAL ADVISORY COMMITTEE
- OUR COMPETITORS
- Photo Gallery
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) is an international robotics competition, to be held every two years.
MBZIRC 2017 Challenge Description
Paris-Saclay University Team
with total prize of USD $5,000,000 .






























































Teaching and Academic Experience
Photo Gallery with my clients









Trained employees or students from more than 120 Company or Organization
International Certificates


2010

2003

2003

2004

2006

2002

2002

2003

2002

2008
Exams Record
Professional Memberships

since 2001

IEEE Computer Society
since 2004

Egyptian Syndicate of Engineers
since 2005

IEEE Robotics and Automation Society
since 2008

Project Management Institute
since 2011

IEEE Communication Society
Previous Projects
Technical Interests
Invited Talks

Personal Skills

Excellent communication & presentation skills

Fast learner

Impressive public speaker

Ambitious, Confident and Persuasive

Interested in social-technical activities

Generalist rather than specialist

Excellent analytical skills

Dynamic with large capacity for work

Goal oriented

Well organized

Sound decision maker
Linguistic Skills
Listening
Speaking
Reading
Writing
Arabic (Mother Tongue)
English (CEF: B2)
French (CECRL: A1)
British Council
-

- Upper Intermediate One Level
-

- Upper Intermediate Two Level
-

- Upper Intermediate Three Level
-

- Upper Intermediate Four Level
-

- Level Seven - Conversation programme
-

- Ielts Academic Level
Technical Skills
- Programming Languages
- Database Engines
- Cross Compilers
- Graphics
- Microcontrollers, Microprocessors, and Digital Signal Processors
- Robotics kits
- Server Operating Systems (Using and Administration)
- Modeling Tools
- Client Operation System
- Real Time Operating Systems
- Simulators
- Project Management Tools
- Source Code Analyzers
- Software Configuration Management Tools
- Ethical Hacking Tools
- Servlet Container
- Automated Build Tools
- IDEs (Integrated Development Environment)
- Web Authoring
- Software Testing
- Miscellaneous
- Customer Relationship Management (CRM)
- Automated Business Workflow Tools
- C/C++
- Microsoft® Visual C++® 6
- Embedded C
- HTML
- XML
- Java™ 2 Platform 1.4
- Assembly
- VHDL (VHSIC Hardware Description Language)
- Pascal
- LISP
- PROLOG
- Microsoft® Visual Basic® .NET
- Perl
- XML
- XPDL
Training Courses
-
- Business Communication – Certified Business Professional program (CBP) (EMAK International Academy, Year 2008)
- كيف تحفظ القران فى 56 يوم (Awareness Corporation, Year 2007)

- أفكار ابداعية لتحفيظ القران الكريم (Awareness Corporation, Year 2007)
- How to Speed Read with Accuracy (Buzan Centres, Year 2005)

- How to improve your Memory (Buzan Centres, Year 2005)
- Train the Trainer (Resala Training center, Year 2003)
- Train the Trainer (New Horizons® Computer Learning Centers, Year 2002)
-
- Project Management Fundamentals (PM10G) (IBM World Trade Corporation, Egypt Branch, Year 2009)

- Contracting for Project Managers (PM12G) (IBM World Trade Corporation, Egypt Branch, Year 2009)

- Getting Started Managing Projects in IBM Rational Portfolio Manager (PM45G) (IBM World Trade Corporation, Egypt Branch, Year 2009)

- Getting Started Using IBM Rational Portfolio Manager for Project Team Members (PM48G) (IBM World Trade Corporation, Egypt Branch, Year 2009)
- Managing Scope Exceptions in IBM Rational Portfolio Manager (PM49G) (IBM World Trade Corporation, Egypt Branch, Year 2009)
- Creating and Managing Project Schedules in IBM Rational Portfolio Manager (PM50G) (IBM World Trade Corporation, Egypt Branch, Year 2009)

- Project Management Orientation (PM54G) (IBM World Trade Corporation, Egypt Branch, Year 2009)

- Financial Management for Project Managers
 (PM63G) (IBM World Trade Corporation, Egypt Branch, Year 2009)
(PM63G) (IBM World Trade Corporation, Egypt Branch, Year 2009)  Creating and Tailoring Project Management Systems (PM76G) (IBM World Trade Corporation, Egypt Branch, Year 2009)
Creating and Tailoring Project Management Systems (PM76G) (IBM World Trade Corporation, Egypt Branch, Year 2009)- Understanding WWPMM (IBM World Trade Corporation, Egypt Branch, Year 2009)
- Exam Preparation Course for Project Management Professional (PMP®) (EMAK International Academy, Year 2008)
- Software Project Management (Software Engineering Competence Centre, Ministry of Communication & Information Technology, Smart Village, Year 2007)
- Project Management Fundamentals (PM10G) (IBM World Trade Corporation, Egypt Branch, Year 2009)
-
- Become a Professional Python Programmer (Udemy, 2018)
- Linux for Beginners (Udemy, 2018)
- Fundamentals of WSDD ver. 5.7.1 (WebSphere Studio Device Developer), OSGi (Open Services Gateway initiative) (IBM World Trade Corporation, Middle East, Year 2006)
- Developing Embedded Applications for Automotive Industry (IBM World Trade Corporation, Egypt Branch, Year 2005)
- VHDL (VHSIC Hardware Description Language) (Software Engineering Competence Centre, Ministry of Communication & Information Technology, Smart Village, Year 2005)
- Digital Signal Processing Using MATLAB® 6.5 (High Tech Center Faculty of engineering, Cairo University, Year 2003)
- Neural Networks Using MATLAB® 6.5 (High Tech Center Faculty of engineering, Cairo University, Year 2003)
- Fuzzy Logic Using MATLAB® 6.5 (High Tech Center Faculty of engineering, Cairo University, Year 2003)
- Adobe® Photoshop® 7.0 me (CASBEC Faculty of engineering, Cairo University, Year 2003)
- Automatic Control Using MATLAB® 6.5 (High Tech Center Faculty of engineering, Cairo University, Year 2003)
- Programming with MATLAB® 6.5 (High Tech Center Faculty of engineering, Cairo University, Year 2003)
- Administrating a Microsoft® SQL Server™ 2000 Database (New Horizons® Computer Learning Centers, Year 2002)
- Querying Microsoft® SQL Server™ 2000 with Transact-SQL (New Horizons® Computer Learning Centers, Year 2002)
- Designing a Microsoft® Windows® 2000 Directory Services Infrastructure (New Horizons® Computer Learning Centers, Year 2002)
- Implementing and Administration Microsoft® Windows® 2000 Directory Services (New Horizons® Computer Learning Centers, Year 2002)
- Implementing Microsoft® Windows® 2000 Network Infrastructure (New Horizons® Computer Learning Centers, Year 2002)
- Implementing Microsoft® Windows® 2000 Professional and Server (New Horizons® Computer Learning Centers, Year 2002)
- Microsoft® Windows® 2000 Network and Operating System Essentials (New Horizons® Computer Learning Centers, Year 2002)
- Digital Signal Processing (High Tech Center Faculty of engineering, Cairo University, Year 2001)
- Microsoft® Visual C++® 6 (CASBEC Faculty of engineering, Cairo University, Year 2000)
- PCB Fabrication and ORCAD® Release 9 (CASBEC Faculty of engineering, Cairo University, Year 2000)
- Micro Controllers (8051 Family, Esp. AT89C4051) (CASBEC Faculty of engineering, Cairo University, Year 2000)
- Computer Interfacing (CASBEC Faculty of engineering, Cairo University, Year 2000)
- Computer Hardware (CASBEC Faculty of engineering, Cairo University, Year 1999)
- Digital & Analog Electronics (CASBEC Faculty of engineering, Cairo University, Year 1999)
- Geographical Information System (GIS) using Geomedia®. (CASBEC Faculty of engineering, Cairo University, Year 1999)
- Microsoft® Access 97 (Institute of statistical researches & studies, Cairo University, Year 1995)
- Using DB IV (Institute of statistical researches & studies, Cairo University, Year 1995).
- Pascal language (Institute of statistical researches & studies, Cairo University, Year 1995)
- C++ language (Institute of statistical researches & studies, Cairo University, Year 1995)
- Microsoft® Windows® 3.11 (Institute of statistical researches & studies, Cairo University, Year 1995)
- Introduction and DOS (Institute of statistical researches & studies, Cairo University, Year 1994)
-
Centre des cours de langue de Mounira
- Découverte 1, 2008
British Council
- Level Seven Level, Conversation Programme, 2005
- Ielts Academic Level, Ielts programme, 2005
Goethe-Institute Kairo
- German language, Grundkrus G1/2 (intensiv), 1996
-
Preparatory year:
- Mathematics 1
- Physics 1
- Descriptive Geometry
- Engineering Drawing
- Chemistry 1
- Mechanics 1
- Intro. to Computers and programming
- Technical Language
- Production Technology1
- History of Engineering Sciences
First year:
- Data Structures and Algorithms
- Econoics nd Management
- Measurements & Laboratory Experiments 1
- Logic Desing
- Civil Enginnering
- Physics 2
- Electrical and Electononis Circuits
- Mathiematics 2
- Programming Techniques
Second Year:
- Mechanical Engineering
- Microprocessor Systems
- Measurements and Laboratory Experiments 2
- Sigmals and Systems
- Software Enginerring
- Probabiltiy and Statistics
- Database Management Systems
- Electroic Suircuits
- Project management
Third Year:
- Computer Architecture
- Measurements and laboratory Experiments 3
- Communication Engineering
- Information Technology
- Numebral Analysis
- Operating Systems
- Digital Electronics
- Machines and Power Eng.
- Contraol and SystemEngineering
Fourth year:
- Advanced Computer Architecture
- Computer Graphics & Man Machine Interface
- Elective 1
- Languages & Compileres
- Project
- Artificial Intelligence
- Computer Networks
- Elective 2
- Elective 3
-
- Advanced Computer Architecture
- Systems Science & Engineering
- Adv. Programming Languages
- Software Engineering
- Real-Time Sys. Robotics
- Sata Acquistion Statems
- Advanced Digital Systems
Volunteering & Charity Work

IEEE (Institute of Electrical and Electronics Engineers) Activities and Responsibilities:
-
Cairo University, Computer Engineering Department Chapter Chair.
-
IEEE Active Member.
-
Participated in organizing of SBC (Student Branch Congress) 2002 and GOLD (Graduates Of Last Decade) 2002.
-
Participated in preparing “Industry University Link Program in Egypt”.
-
I was Management board member for RTC for many years.
-
Delivered many courses in RTC.
Travel Experience
Traveled to: France, United Kingdom, Germany, Belgium, Tunisia, United Arab Emirates, Kuwait, Qatar, Saudi Arabia, Palestine and Malaysia.
I have worked with many nationalities from: United States, Canada, Russia, Greece, Pakistan, Syria, Lebanon, Nigeria, Somalia, South Africa, Algeria, Morocco, Sudan, India, Yamen, Oman, China, South Korea and Japan.
Hobbies
Cooking & BBG

Horse Riding

Shooting

Travelling

Museums

Photography

Watching documentary movies
Honors & Recognition Awards
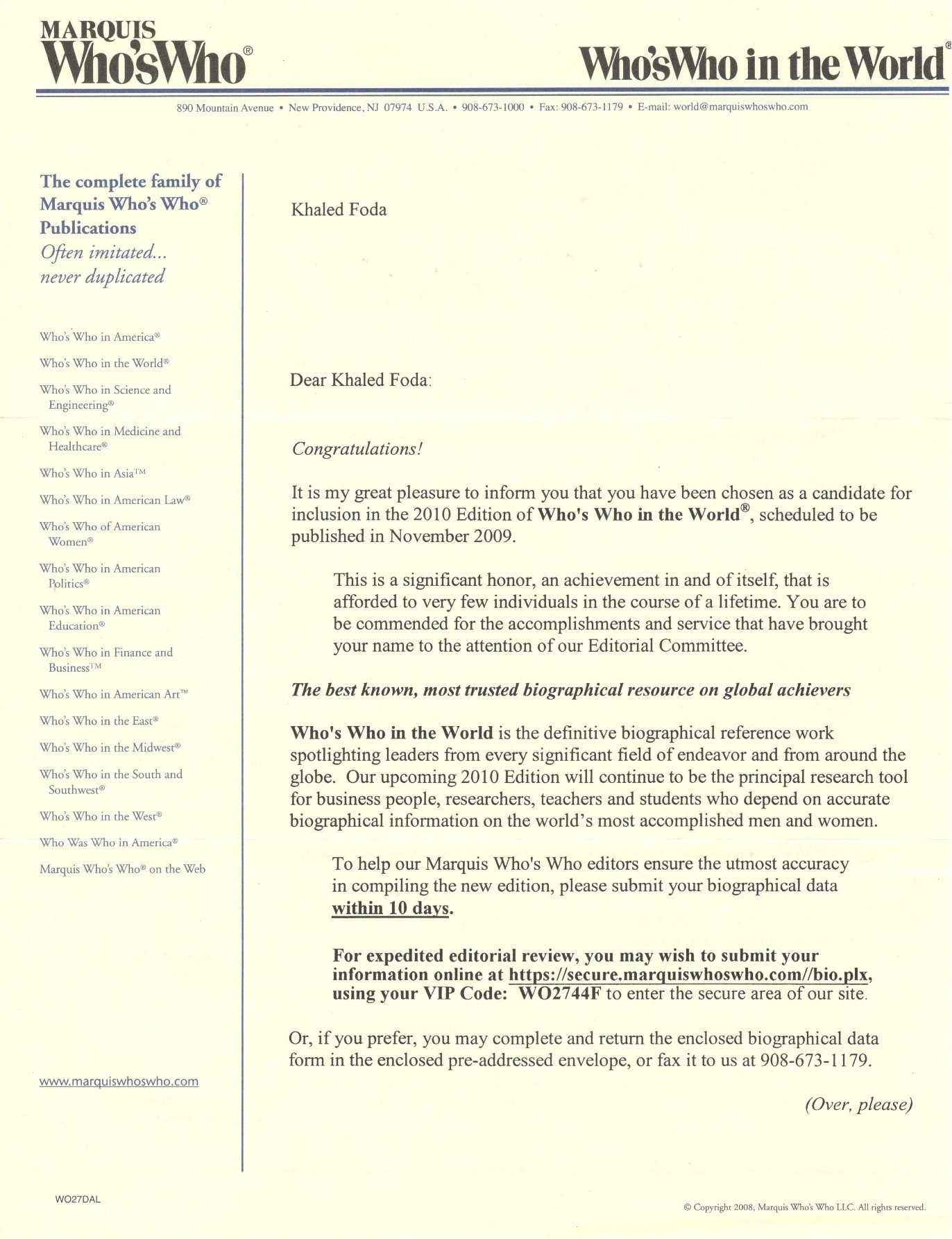
Certificate of Participation in MBZIRC-2017 from Khalifa University Certificate of the final selection phase, only qualified team from France to participate in MBZIRC-2017 from Paris-Saclay University and University of Versailles Saint-Quentin-en-Yvelines Honor Plaque from Shorouk Academy 2011 (for giving a speech around “The Importance of soft skills in building a new Egypt” and was dedicated from the President of the Shorouk Academy Prof Mohamed Shouman) Honor Plaque from Egyptian Russian University 2011 (for giving a speech around “The Importance of soft skills in building a new Egypt” and was dedicated from the President of the ERU Prof Sherif M.Helmy) I have been nominated to appear in the 2010 Edition “Who’s Who in the World®” 2009 (Founded in 1974 by Albert Nelson Marquis) Canadian International College Students (for supervising their graduation projects and Win the first three positions) Outstanding Performance from EMAK International Academy for outstanding performance in instructing Certified Business Professional (CBP) I have also been nominated to appear in Great Minds of 21st Century by American Biographical Institute (ABI). (a major reference directory including just 1,000 of the world’s top thinkers and intellectuals) The Cabinet, Information and Decision Support Center, the Electronic Business Institute (for training the first MCSE track) I have been MCT when I was 21 years old




References & Recommendations

Prof. Dr. Ahmed Darwish
Professor at Faculty of Engineering, Cairo University
Prof. Dr. Nevin Darwish
Professor, Emeritus at Faculty of Engineering, Cairo University
Prof. Dr. Yasser Alayli
Scientific Director
Dr. Samer Alfayad
Associate professor at Paris-Saclay (UVSQ) University; Hold an Industrial excellence chair (UVSQ & BIA company)-
I worked with Khaled for 2 years. During this period, he was an excellent team member with high level of dedication and enthusiasm. Khaled is a endless source of positive energy that drive the whole team to do and achieve more. With his strong positive spirit of "nothing is impossible", he accomplished tasks that were far above his level of seniority at that time. Good Luck Khaled, and hope to hear always great news about you.

-
Really it a great honor to recommend Khaled..whom I consider a role model I aim to reach..He provided me PMP course..during course period and afterwards I found Khaled with deep extensive professional background..always delivering info with a creative way with a laugh..his sense of humor and wide knowledge makes him the best instructor ever :)..his exceptional performance and his skills make me wish to work with him one day so I can get the best real life experience in PMP's field..Khaled has been gifted by extraordinary interpersonal skills in addition to deep technical expertise with real life experience and strong ethical and human values that makes him really unique.

-
I had the honor of working with Khaled , he is a very efficient professional and is a great leader , a true professional Management expert with the highest degree of knowledge,expertise, ethics and integrity.

-
Dr. Khaled is one of those rare managers who also naturally serves as an inspiring mentor for the whole staff. With a background in engineering with more than ten years’ worth of experience as an educator, Khaled exhibits strong interpersonal skills and a unique capacity for empathy. These qualities most notably translate in his ability to motivate a team to care about its project and be invested in the project’s success. Khaled is the go-to person for conflict resolution and problem solving; when fights break out in boardroom meetings, he steps in to diffuse tension and induce compromising. Though he’s never one to draw attention to himself, Khaled’s positive attitude and the respect others feel toward him are palpable.

-
It is not easy to recommend Khaled because of his vast skills. During 4 years of work, Khaled showed versatile skills with an innovative vision and a thought super intelligent. Khaled was an inspiration for every person on our team. He had both the technical and the management spirit. It's difficult to find someone who has these both skills. Khaled fits the bill. His suggestions were insightful and were realistic to implement. I'd recommend his services to any company going through a rough spot, or even if things are running smoothly. He really brought us together, increasing both productivity and morale.

-
It is my pleasure to work with Khaled in many projects, he is very efficient manager with very high technical experience, he know exactly what the business means.

-
I had Khaled as a teacher in college. Khaled has great communication skills as it was apparent of how easily he can explain complex ideas without effort. Khaled also likes tounder stand ideas to their very details. Having Khaled as a teacher in college was definitely a great Experience

-
Khaled is one of the most talented PMP instructors,i took the course with him and really impacted my Career within a very short time, Khaled has a strong and unique project management experience and he transfers his experience smoothly in a very exciting way..... I highly recommend Khaled for any PM position and strongly as a PM instructor.

-
Khaled helped me a lot to understand the fundamentals of project management and hold the PMP certificate

-
Dr. Khaled recommended on the managerial level and project management .

-
Khaled is a very professional person, he care about the business and the team members, He has a vision and hard worker. work under pressure without being complain, and has very good manner and communication skills

-
Who Recommend Who ... Student to His Mentor, Professor, Brother and such great leader, one of the Best who can work with and learn from, his passion and Profession just a proof of his hard work and intelligence, one of the best scientists and project managers I ever worked and learned from..... Thanks for Everything BOSS Until we meet again.

-
I have known DR.Khaled personally for over six years, and have always known he is an organized and responsible individual During the time I have known him, Dr.Khaled has been active in our community, serving on the Library Board and the Historical Society. he has taken many responsible roles in both of these organizations. he achieved multiple successes in both of positions.

-
Khaled mentored me during my Master's project at the LISV in Velizy. He displayed good leadership skills, a passion for his work.He is very knowledgeable in his field and has excellent engineering and robotic skills. I was very impressed by his work.

My Certificates
Year: 1994 I 1995 I 1996 I 2000 I 2001 I 2002 I 2003 I 2004 I 2005 I 2006 I 2007 I 2008 I 2009 I 2010 I 2011 I 2012 I 2013 I 2014 I 2015 I 2017 I 2018
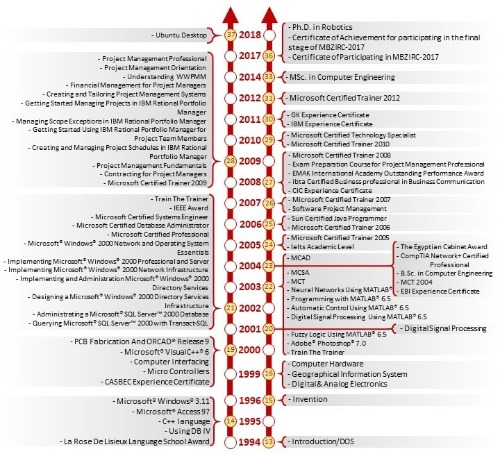
2018
-

- Ubuntu Desktop

-

- Project Management Professional 2009-2021
-

- Egyptian Syndicate of Engineers (ESE) since 2004
-

- French innovation 2017
2017
-
- PhD. in Robotics
-

- PhD. in Robotics - English

-

- PhD. in Robotics - French

-

- PhD equivalence Certificate from Supreme Council of Egyptian Universities

-

- Certificate of Participating in MBZIRC-2017
-
- Certificate of Achievement for participating in the final stage of MBZIRC-2017
2015
-
- Project Management Professional 2009-2018

2014
-
- MSc. in Computer Engineering
-
- MSc. in Computer Engineering - English
-

- MSc. in Computer Engineering - Arabic
-

- MSc. in Computer Engineering - transcript
-

- MSc. equivalence Certificate from Supreme Council of Egyptian Universities

-

- MSc. Jury committee Signature - English
-

- MSc. Jury committee Signature- Arabic
2013
-
- Microsoft Certified Trainer 2013

-

- Leoni Certificate

-

- New Horizons - PMP Course 2013
2012
-

- Microsoft Certified Trainer 2012

-

- Project Management Professional 2009-2015

2011
-

- Microsoft Certified Trainer 2011

-

- GK Experience Certificate
-
- IBM Experience Certificate
-

- IBM Experience Certificate
2010
-
- Microsoft Certified Trainer 2010

-
- Microsoft Certified Technology Specialist
-
- Global Knowledge - PMP Course Dec 2010
-

- Global Knowledge - PMP Course Nov 2010
-

- Global Knowledge - PMP Course Oct 2010
-
- EMAK - PMP Course 2008 - 2010
2009
-
- Microsoft Certified Trainer 2009
-

- Project Management Professional 2009-2012

-

- Creating and Tailoring Project Management Systems (PM76G)
-

- Financial Management for Project Managers (PM63G)
-

- Project Management Orientation (PM54G)
-

- Creating and Managing Project Schedules in IBM Rational Portfolio Manager (PM50G)
-

- Managing Scope Exceptions in IBM Rational Portfolio Manager (PM49G)
-

- Getting Started Using IBM Rational Portfolio Manager for Project Team Members (PM48G)
-

- Getting Started Managing Projects in IBM Rational Portfolio Manager (PM45G)
-

- Understanding WWPMM (PM 36)

-

- Contracting for Project Managers (PM12G)

-

- Project Management Fundamentals (PM10G)
2008
-
- Microsoft Certified Trainer 2008
-

- Exam Preparation Course for Project Management Professional (PMP®)

-
- EMAK outstanding Performance in Instructing Certiied Business Professional (CBP)
-
- ibta Certified Business professional in Business Communication
-

- Canadian International college - Spring 2009
-

- Canadian International college - Summer 2008
-
- Canadian International college - Spring 2007
-
- Canadian International college - Fall 2008
2007
-
- Microsoft Certified Trainer 2007

-

- Software Project Management

-

- أفكار ابداعية لتحفيظ القران الكريم

-

- كيف تحفظ القران فى 56 يوم
-

- Canadian International college - Spring 2007
-

- Canadian International college - Fall 2007
2006
-
- Microsoft Certified Trainer 2006
-

- Sun™ Certified Programmer
-
- Upper Intermediate Four Level
2005
-
- Microsoft Certified Trainer 2005
-
- Ielts Academic Level
-
- Upper Intermediate One Level
-
- Upper Intermediate Two Level
-
- Upper Intermediate Three Level
-
- Level Seven - Conversation programme
2004
-
- Microsoft Certified Trainer 2004
-

- The Cabinet Award
-

- Electronic Business Institute Letter
-

- CompTIA Network+ Certified Professional

-

- CompTIA Network+ Certified Professional Transcript
-

- Faculty of Engineering Cairo University Recognition Certificate - Arabic
-
- B.Sc. in Computer Engineering - Arabic
-
- B.Sc. in Computer Engineering
-

- B.Sc. in Computer Engineering - transcript
-

- B.Sc. in Computer Engineering - Arabic
2003
-
- Microsoft Certified Trainer 2003
-

- Microsoft Certified Application Developer
-
- Microsoft Certified Systems Administrator
-

- Neural Networks Using MATLAB® 6.5
-

- Programming with MATLAB® 6.5
-

- Automatic Control Using MATLAB® 6.5
-

- Digital Signal Processing with Sumulink
-
- Fuzzy Logic Using MATLAB® 6.5
-

- Adobe® Photoshop® 7.0

-
- RTC Train The Trainer
2002
-

- Microsoft Certified Trainer 2002
-
- Microsoft Train The Trainer
-
- IEEE Award
-
- Microsoft Certified System Engineer
-
- Microsoft Certified Database Administrator
-

- Microsoft Certified Professional

-

- Administrating a Microsoft® SQL Server™ 2000 Database

-

- Querying Microsoft® SQL Server™ 2000 with Transact-SQL

-

- Designing a Microsoft® Windows® 2000 Directory Services Infrastructure

-
- Implementing and Administration Microsoft® Windows® 2000 Directory Services

-

- Implementing Microsoft® Windows® 2000 Network Infrastructure

-

- Implementing Microsoft® Windows® 2000 Professional and Server

-

- Microsoft® Windows® 2000 Network and Operating System Essentials
2001
-

- Digital Signal Processing
2000
-
- PCB Fabrication & ORCAD® Release 9
-
- Microsoft® Visual C++® 6
-
- Computer Interfacing

-
- Micro Controllers

-
- CASBEC Experience Certificate - Arabic
1999
-

- Digital & Analog Electronics

-

- Computer Hardware

-

- Geographical Information System

-
- Zamalik Sporting Club Award
1996
-

- Egyptian innovation 1996
1995
-
- La Rose De Lisieux Language School Exemplary Student
-

- Using DB IV
-

- C++ language
-

- Microsoft® Access 97
-
- Microsoft® Windows® 3.11
1994
-
- Introduction / DOS
My Heroes
من أكثر الشخصيات تأثيرا في شخصيتى بعد الرسل والأنبياء والصحابة هم : محمد الفاتح وصقر قريش

Prof. Dr. Mohamed Samir Fouda

Prof. Dr. Mohmoud El-Sherbini

Eng. Ahmed Talaat

Prof. Dr. Ahmed Darwish

Prof. Dr. Sherif Abd El Azim

Prof. Dr. Mohamed Shaker
My Personal Information

Birth Date:

Birth City:

Nationality:

Marital status:

Driving Licenses:

Valid Passport:

Military service status:

Religion:

Residential Country:

Children:
Summary


Downloads
My Photo
Dimensions: 1300 x 1300 Pixels
Size: 156 Kbyte

Dimensions: 1300 x 1950 Pixels
Size: 278 Kbyte

My Infographic Resume
File Formate: PDF
Size: 718 Kbyte
Number of pages: 2
Colored version
My Detailed CV
File Formate: PDF
Size: 1.3 Mbyte
Number of pages: 17
Colored version
Scan QR-code to add my contact to your contact list

My certificates summary
أصل عائلة فوده
فرع فوده ينتمى الى شبه الجزيره العربيه وقد هاجر الى مصر و فلسطين واستقر فيها ومنها انتشر ابناؤه.
:الاسم الكامل ل فوده هو كما يلى
فوده بن محمد بن منصور بن منصور بن منصور بن يوسف بن يوسف بن عزالدين بن محمد بن جبير بن محمد بن أحمد بن عيسى أبو الحواجب بن نجم الدين بن على قريش بن ابى النجا بن زين العابدين بن عبد الخالق بن محمد بن أبى الطيب بن محمد بن عبد الخالق بن موسى بن على قريش بن جعفر الزكى بن على العلا بن محمد الجواد بن على الرضى بن موسى الكاظم بن جعفر الصادق بن محمد الباقر بن زين العابدين بن الحسين بن على كرم الله وجهه زوج السيده فاطمه الزهراء بنت سيدنا محمد صل الله عليه وعلى آله وسلم.