Dr. Khaled FOUDA's web Resume This site is under construction
Taught Hours
Managed Project
Years of Experience
Profile I Current Job I Employment History I Educational Records I PhD Research Summary I Master’s Research Summary I Graduation Project I Publications & Patents I Experience I Robotics & Mechatronics Experiences I International Robotics Competitions I Teaching and Academic Experience I International Certificates I Professional Memberships I Previous Projects I Technical Interests I Invited Talks I Personal Skills I Linguistic Skills I Technical Skills I Training Courses I Volunteering & Charity Work I Travel Experience I Hobbies I Honors & Recognition & Awards I References I My Certificates I My Heroes I Personal Information I Summary I Download My CV I أصل عائلة فوده
Profile
Educational Record I Research Activities I Consulting & Teaching I Project Management I Certification & Memberships
-
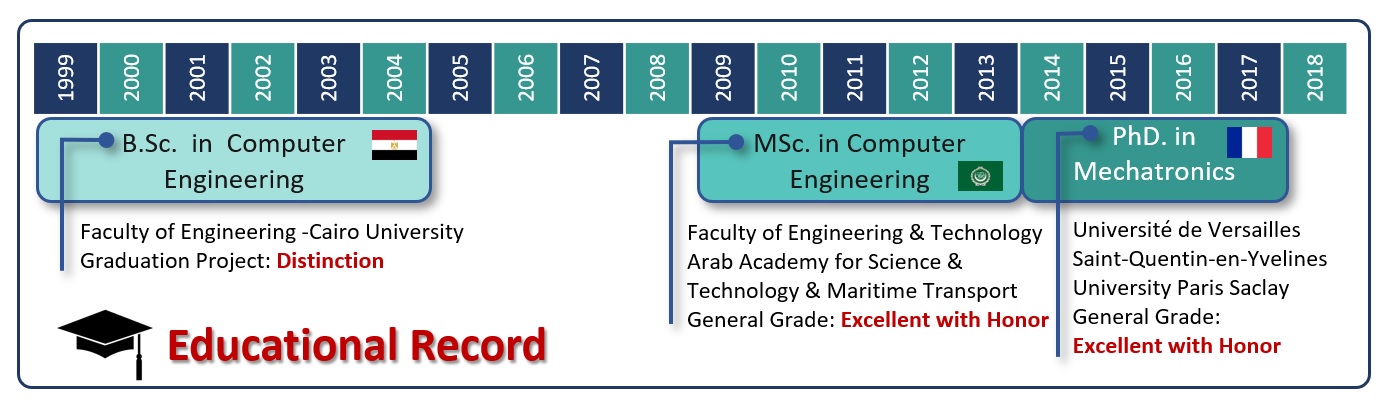
I was born in Egypt in 1981. I obtained my PhD from Paris-Saclay University and Université de Versailles Saint‐Quentin‐en‐Yvelines – France in 2017 in Robotics. My research interests include humanoid and service robots. I obtained my MSc. in Computer Engineering from The Arab Academy for Science & Technology & Maritime Transport in Egypt in 2014 in Computer Engineering and received my BSc. from Cairo University, Egypt in 2004 in Computer Engineering.
-
In the field of research activities, I published 14 technical papers in international conferences and highly reputable journals. In 2017, I participated in a patent in the National Institute of Industrial Property in France “Multidirectional Active Integrated Omni wheel Motor”. Ref. No: FR3063453, Year: 2017. In 2015, I devised a “Closed-form solution for direct geometric model for Stewart platform” which was unknown since 1965. Stewart platform is an essential mechanism for flight simulators. I also participated in designing, manufacturing, and controlling seven robots. At the age of 15; I patented “Apparatus to Generate Electricity from the Earth Gravity and Distillate Water”, registered at Academy of Scientific Research and Technology, Patent Office in 1996.



-
In the field of consulting and teaching, I am Regional Director & Member of the Board of Directors at Etqan-Tech, I was the Managing Director at FodaDev. I worked as a Senior IT Consultant at Arab Women Organization; League of Arab States, Project Management Consultant at Arab Administrative Development Organization – League of Arab States and Senior Services Management and Business Skills Consultant at Global Knowledge. Since 2011, worked as a Project Manager, and Focal Strategic Consultant at IBM Global Delivery Center for Egypt, Romania, Vietnam, China, Brazil, and Argentina at IBM World Trade Corporation, from 2005 to 2011. Before this position, I worked as an Embedded Systems Engineer. I also worked as a freelance instructor in many international training centers, governmental centers, institutes, universities, and colleges, and worked as a part-time lecturer at the Canadian International College (CIC) from 2007 to 2011, Cairo campus of Cape Breton University (CBU) in Canada. I am an internationally recognized expert in providing training, taught 3568 hours of professionals, managers, leaders, and undergrads from different nationalities.



-
In the field of project management and IT, my experience is based on almost 18 years in the IT industry in many international projects of budgets up to $140 Million. I have experience in waterfall and Agile models. During 56 projects in different fields, I practiced the following activities; Project Management, Focal Strategic Consultant, Consultancy, Software and Hardware Support, Designing, Coding, Software Integrating, Technical Testing, Functional Testing, Software Infrastructure, Servers’ Maintenance, Technical Documentation, introducing and presenting new technologies, conducting technical sessions.





-
I hold several International certifications from Microsoft, Sun Microsystems, Project Management Institute, International Consortium for Agile (ICAgile), SCRUM ALLIANCE®, CompTIA, and IBTA including Microsoft Certified Trainer, Project Manager Professional, ICAgile Certified Professional, Certified ScrumMaster®, Microsoft Certified Technology Specialist, Microsoft Certified System Engineer, and Microsoft Certified Application Developer. I am a member in the Institute of Electrical and Electronics Engineers (IEEE) since 2001, Project Management Institute (PMI), IEEE Computer Society, IEEE Robotics and Automation Society.



Current Employment
2020 – Present
Regional Director & Member of the Board of Directors
Responsibilities: Evaluate business progress and create and institute strategies to accomplish the goals of the company.

2020 – Present
Assistant Professor
Responsibilities: I conduct weekly teaching sessions, lectures, assign and grad projects, exercises and assess the progress of students, supervising undergraduate projects, and graduation projects, Grading the final and midterm exams.

2020 – Present
Assistant Professor
Responsibilities: I conduct weekly teaching sessions, lectures, assign and grad projects, exercises and assess the progress of students, supervising undergraduate projects, and graduation projects, Grading the final and midterm exams.
Employment History
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

-
2011 –2013
Founder & Managing Director
FodaDev LLC. – Cairo, Egypt
Responsibilities: Formulating and successfully implementing Fodadev policy. Directing strategy towards the profitable growth and operation of Fodadev. Developing strategic operating plans that reflect the longer-term objectives and priorities established by the board. Putting in place adequate operational planning and financial control systems. Ensuring that the operating objectives and standards of performance are not only understood but owned by the management and other employees. Closely monitoring the operating and financial results against plans and budgets. Taking remedial action where necessary and informing the board of significant changes. Maintaining the operational performance of Fodadev. Monitoring the actions of the functional board directors. Assuming full accountability to the board for all Fodadev operations. Representing the company to major customers and professional associations. Building and maintaining an effective executive team.
-

2007 –2011
University Lectures
CIC – Canadian International College – Cairo, Egypt
Responsibilities: As a lecturer, I conduct weekly teaching sessions, lectures, assign and grad projects, exercises and assess the progress of students, supervising undergraduate projects, and graduation projects, Grading the final and midterm exams.
-

2005 –2011
Project Manager
IBM World Trade Corporation – Cairo, Egypt
Responsibilities: Project Management, Consultancy, Focal Strategic Consultancy for Egypt, Romania, Vietnam, China, Brazil, and Argentina, Team Leading, Software Support Designing, Coding, Software Integrating, Technical Testing, Functional Testing, Software Infrastructure, Servers’ Maintenance, Technical Documenting, Introducing and Presenting new technologies, Conducting technical sessions.
Positions History: Focal Strategic Consultant, Mobilization Manager, Project Manager, IBM Rational Consultant, Embedded Software Engineer, Associate Software Engineer.
-

2008 –2013
Project Management and Soft Skills Instructor
EMAK International Academy – Cairo, Egypt & Kuwait.
Responsibilities: Teach the core business skills required for the young Business Professionals; which covers these curriculums: Leadership, Business Communication, Business Etiquette, and Customer Services.
-

2005
Embedded Systems Developer
Software Engineering Competence Center – SECC Cairo, Egypt
Responsibilities: Project Coordinating, Hardware Designing, and Introducing and Presenting new technologies.
-
2012 –2013
Project Management Instructor
New Horizons Computer Learning Centers – Cairo, Egypt
Responsibilities: Teach Project management course.
-

2012 –2013
Project Management Instructor
AMIDEAST- Cairo, Egypt, Tunisia
Responsibilities: Teach PMP exam preparation course.
-

2013
Project Management Instructor
Arab Administrative Development Organization – League of Arab States – Cairo, Egypt
Responsibilities: Teach Project management course.
-

2011
Senior IT Consultant
Arab Women Organization – League of Arab States – Cairo, Egypt
Responsibilities: Supervise the IT team of the AWO, consult them in the development and in the backup procedures, schedule a weekly meeting with the team, and write a report at the end of this period about the performance of each team member and all the requirements to enhance the performance of the IT department.
-

2011
Senior Services Management and Business Skills Consultant
Global Knowledge – Cairo-Egypt, London-UK, Riyadh- Saudi Arabia, Dubai-UAE
Responsibilities: delivered IT, project management, ITIL courses -

2004 –2005
Computer Network Instructor
The Egyptian Cabinet, Information and Decision Support Center, the Electronic Business Institute – Cairo, Egypt
Responsibilities: Teaching MCSE complete track.
-

2013
Project Management Instructor
Egabi- Cairo, Egypt
Responsibilities: Teach PMP exam preparation course.
-

1999 –2002
Computer Science Instructor
Center for Advanced Software & Biomedical Engineering Consultation – CASBEC Cairo University – Cairo, Egypt
Responsibilities: Instructing, Preparing materials and exams, Labs setup and infrastructure, Maintenance.
-

2019
Specialized R&D Engineer
Dassault Systèmes – Vélizy-Villacoublay, France
Responsibilities: Satisfy our Users, Customers & Partners thanks to Superior Technical Expertise by answering requests, monitoring usage, listening to feedbacks and communicate improvements.
Educational Record
PhD. in Robotics

MSc. in Computer Engineering

B.Sc. in Computer Engineering

Sep. 1984 – May 1998
La Rose De Lisieux Language School
Egypt
General Secondary Certificate Percent 98.2%
PhD Research Summary
PhD. in Robotics
Oct. 2013 – Dec. 2017

Paris-France
Laboratoire D’Ingénierie Des Systèmes De Versailles
Université De Versailles Saint‐Quentin‐En‐Yvelines
Université Paris Saclay

Thesis Title: “Testing Machine for Transtibial and Transfemoral Prosthesis”
Abstract
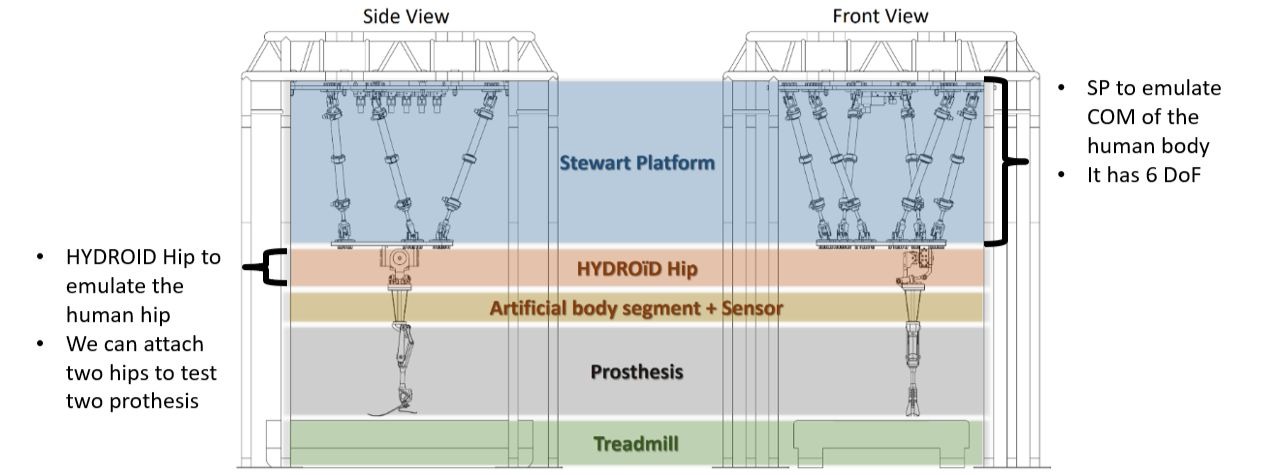
The objective of this work is to build a testing machine for prosthesis. The machine should be able to reproduce the same dynamic and kinematics conditions applied on the prosthesis during the normal use.
Numbers of amputation and causes of amputation were collected. Different types of prosthesis were classified according to the leg prosthesis per amputation height, passive and active prosthesis, differentiated by the nature of their actuator. Most of the testing machine for the prosthesis were studied form the technological and capability prospective. Determining all the limitations of most of existing testing machines, and the needs to develop a new machine to full fill these needs were developed.
Then we studied and analyzed the dynamics of the human gait and run. The equations of motion by taking into consideration the masses and moments of inertia of skeletal segments. Most of the parameters of gait were extracted. In conclusion, we have the kinematic requirements of the human center of gravity to generate 6 DOF that the testing machine should carry out to emulate the normal human gait and run.
Three designs were proposed to implement the testing machine; Articulated robot arm, Cartesian manipulator, and Stewart Platform (SP). After implementing the three solutions we found the most suitable solution is the SP attached with it an artificial active hip. We have chosen the hydraulic power as it is the most suitable actuation technique for our solution knowing the required actuation forces.
To help in controlling the SP motion, a novel Closed-form solution of direct Geometric model for planer and 6-6 Stewart Platform using the rotary sensors instead of liner sensors as wanted to the hydraulic actuators was developed. Sensitivity analysis was studied for that solution, and analytical calculation for computing the workspace was also developed.
The conclusion from this testing machine is that we can create all the dynamics of the human body, i.e. walking or running or going up and down stairs. The developed solution can carry testing procedures for either passive or active prothesis
Realization of Testing Machine for Transtibial and Transfemoral Prosthesis
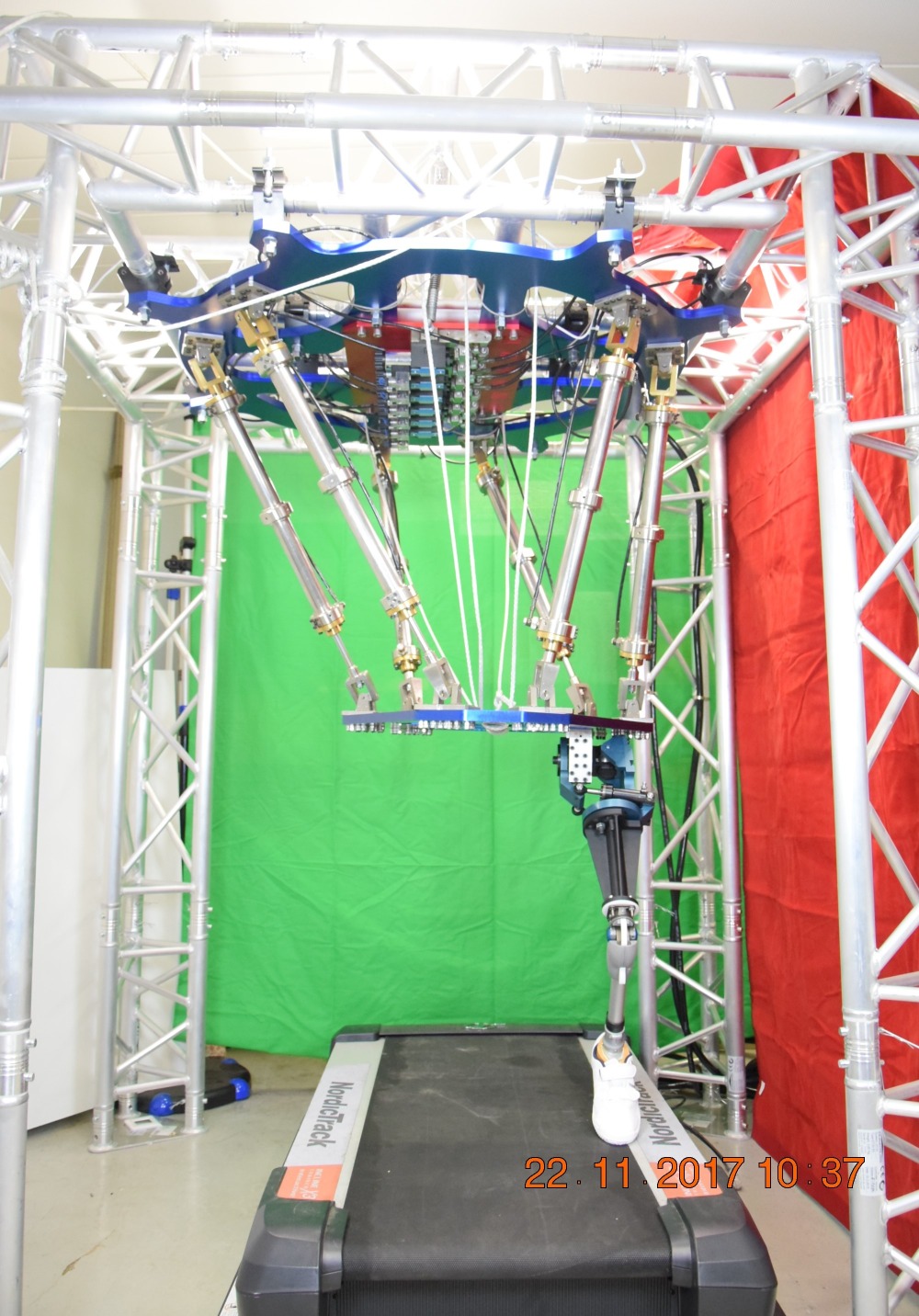
Upper universal Joint

Stainless steel Hydraulic cylinder

Lower universal joint

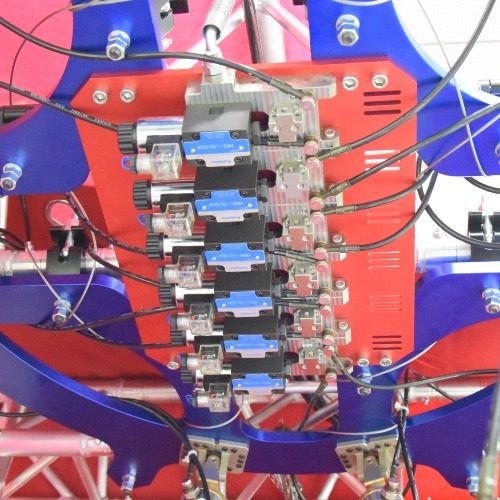
Hydraulic Manifold System
Prosthesis tested by PTM
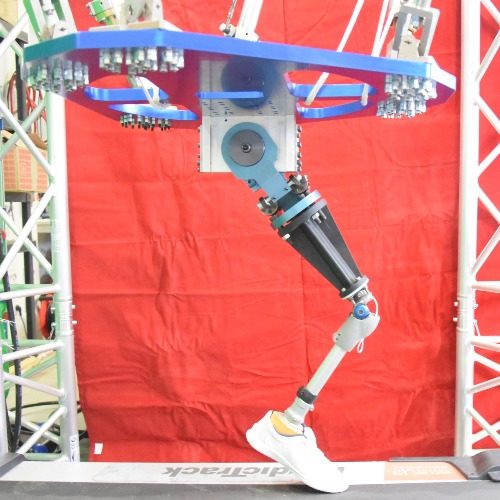
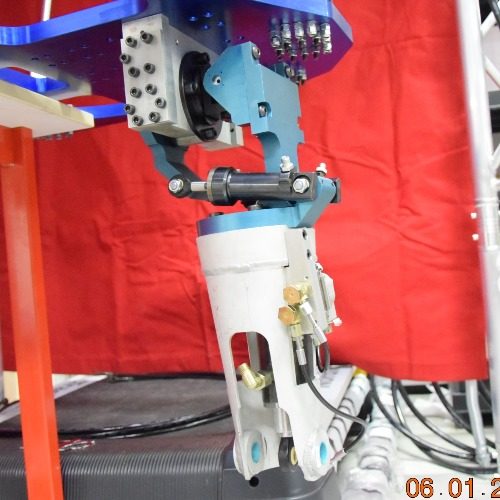
HYDROïD Hip
Simulation of Testing Machine for Transtibial and Transfemoral Prosthesis
Check the presentation of my thesis
-

Professeur Olivier Bruneau
Université Paris-Saclay – LURPA ENS Paris-SaclayPrésident

Professeur Yannick Aoustin
Université de NantesRapporteur

Professeur Luige Vladreanu
Institute of Solid Mechanics, Romanian AcademyRapporteur

Dr. Xavier Bonnet
Maître de Conférence, Arts et Métiers ParisTechExaminateur

Dr. Eric Le Carpentier
Maître de Conférence, Ecole Centrale de NantesExaminateur

Professeur Fethi Ben Ouezdou
Université Paris-Saclay – UVSQ (LISV)Directeur de thèse

Dr. Samer AlFayad
Université Paris-Saclay – UVSQ (LISV)Co-Directeur de thèse
Master’s Research Summary
MSc. in Computer Engineering
Mar. 2008 – Apr. 2014
 Cairo Egypt
Cairo Egypt
Faculty Of Engineering & Technology – Arab Academy For Science & Technology & Maritime Transport
General Grade: Excellent With Honor
GPA: 3.42 on a 4.0 scale
Thesis Title: “Embedded System Architecture of Mobile Electronic Arabic Braille Panel for Reciting the Holly Qur’an (Rasm Al-’Uthmani)”
Abstract
This thesis concerns with reorganizing new Braille symbols to represent all the diacritics in the Arabic Quran, the aim of this study is building a system that translates the Quran verses to Qur’anic code, then extracting all similar patterns of variable lengths using enhanced (Lempel, Ziv, and Welch) LZW data Compression technique, creating an embedded search engine based on microcontroller that enable the user to select the soura, ayah, goz’, hizb, page, or line to read. We will use the display control circuit due to complexity in showing sequence of Braille character, and (Multi Media Card) MMC card as a storage media. This embedded system can switch between Egyptian or Saudi Braille system.

Check the presentation of my thesis
Jury committee

Prof. Dr. Ahmed Fahmy
Chair Computer Engineering Department AASTMT College of Engineering and Technology in Cairo

Prof. Dr. Yousry El-Gamal
Former Minister of Education for Egypt

Prof. Dr. Nevin Darwish
Chair Computer Engineering Department Faculty of Engineering at Cairo University

Prof. Dr. Khaled Shehata
Dean of AASTMT College of Engineering and Technology in Cairo

Dr. Hanady Hussien
Head of Education planning at Arab Academy for Science, Technology and Maritime Transport
Graduation Project
B.Sc. in Computer Engineering
Sep 1998 – May 2004
Cairo Egypt
Faculty of Engineering – Cairo University
Graduation Project Grade: Distinction
GPA: 3.28 on a 4.0 scale

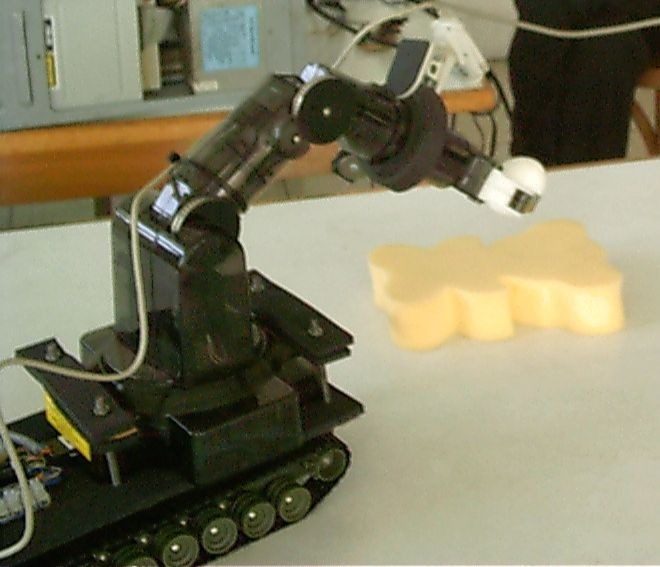
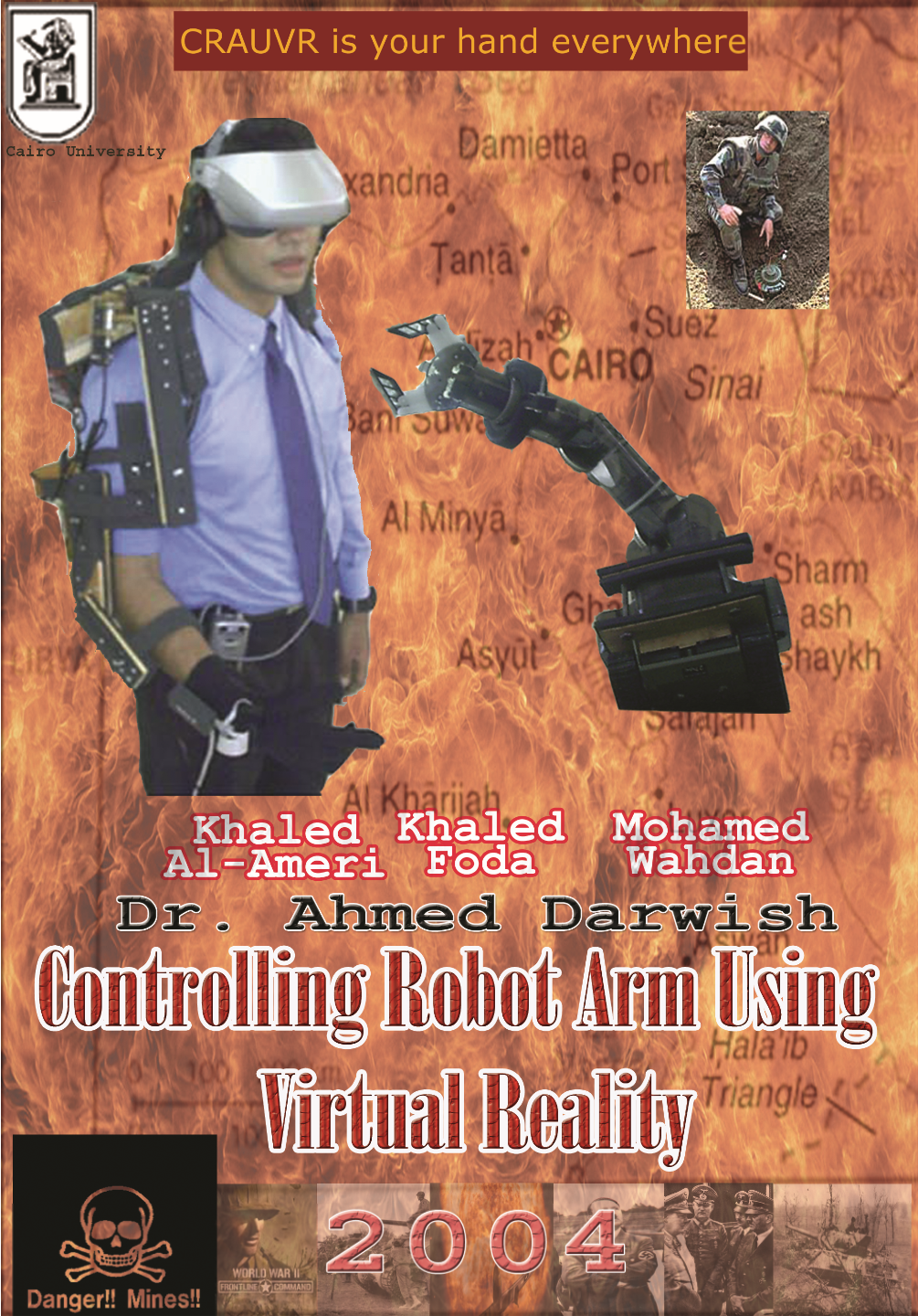
Title: ” Controlling a Robot Arm Using Virtual Reality” (CRAUVR) “
CRAUVR Is Your Hand Everywhere
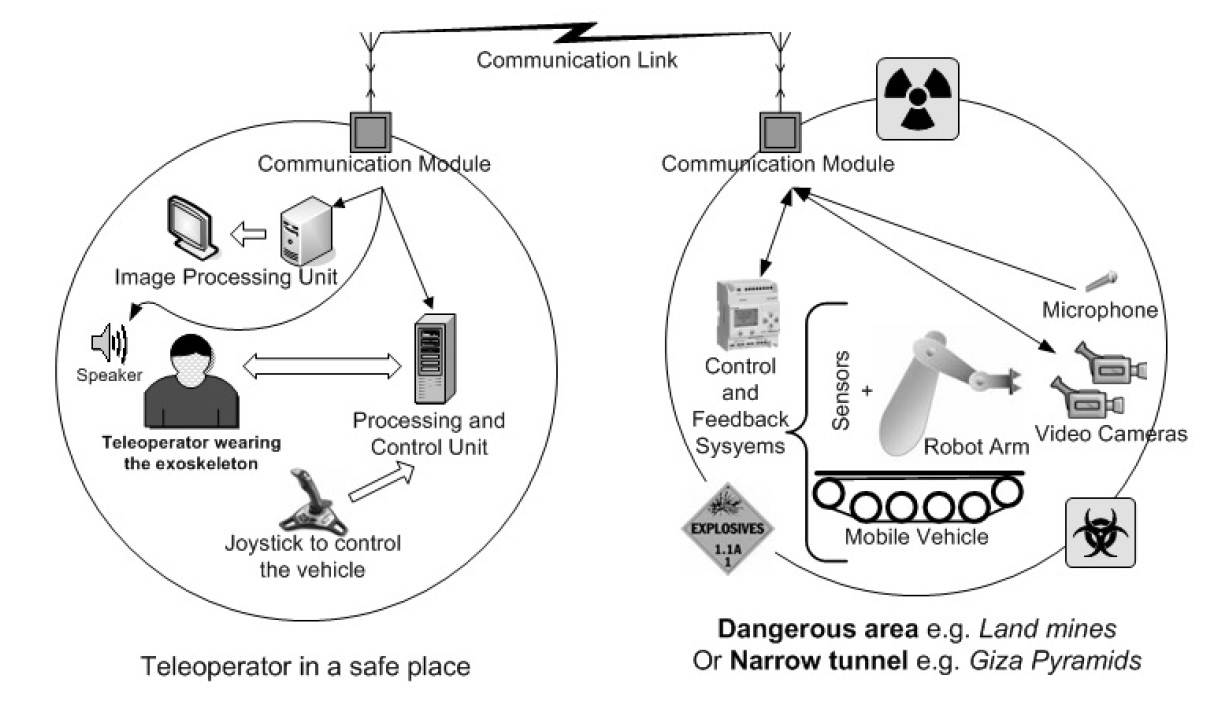
Abstract
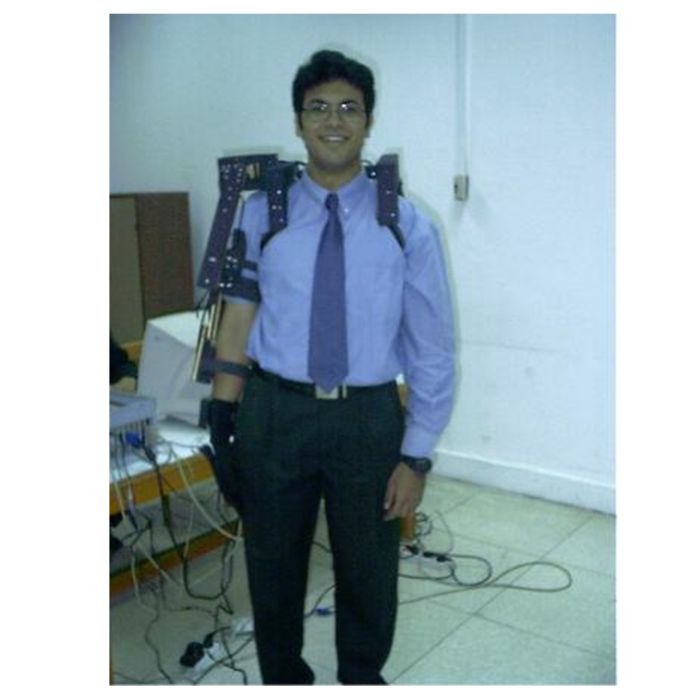
I have participated in “Controlling a Robot Arm Using Virtual Reality” where we designed and executed robot control system and most of the virtual reality parts such that robot arm simulates exactly the movement of the human arm and with very high precision. This project has many applications and from the most important ones are the following: Removing the land mines from the western desert by controlling the robot arm remotely, where the user is in totally safe place, far away from any danger and controls the robot which will enter the mines fields to extracted without explosion. If any mine exploded suddenly as expected from an iron mine being exposed to the rain and to the hot of the desert sun from more than 50 years, it will explode in a cheap robot that costs 700 EGP. We can say that we saved human’s life or human who is possibly lose a part of his body with 700 EGP ONLY.
Teleoperator

Mobile Robot
Demo of Controlling a Robot Arm Using Virtual Reality
Applications

Getting the mines from the desert remotely

Operate a remote Surgery between the capital and a submarine

Exploring the Egyptian pyramids
Media
Presented this project in many TV shows on more than 9 satellite channels, e.g. Nile News Channel, Mehwar Channel, Nile Educational Channels and others. Many national and international newspapers published some articles about that project
Mehwar TV Channel
Sout El-Gamaa - page 8 date: 29-03-2005

Al-Ahram Newspaper- page 13 date: 12-08-2004

Similar projects done after CRAUVR
The German Army model is equipped with five cameras and a double shot disruptor type Richmond RE70.


Researchers at the Korea Institute of Science and Technology, in Seoul, created an exoskeleton master arm that can control a humanoid robot's arms.

Jury committee & Team members
Prof. Dr. Ahmed Darwish

Supervisor
Former Minister of State for Administrative Development for Egypt
Prof. Dr. Gamal Aly

Examiner
Senior Consultant at Ministry of Communication and Information Technology Technology and Communications
Prof. Dr. Salwa Nassar

Examiner
Head of Computer Systems Department, Electronics Research Institute
Khaled Al-Ameri

Team member
Khaled M.S. Fouda

Team member
Mohamed Wahdan

Team member
Publications & Patents
-
2007
Khaled M.S. Foda, Mohamed H. Wahdan, Khaled A. Al-Ameri, Ahmed M. Darwish: Controlling a robot arm using exoskeleton for land-mines disposal. Computer Engineering & Systems, 2007. ICCES ’07. International Conference on; 12/2007, DOI:10.1109/ICCES.2007.4447020
-
- KARDOFAKI Mohamad, FOUDA Khaled, ALFAYAD Samer: Design of an Active Integrated Omni Wheel Motor for Holonomic Mobile Platforms.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Closed-form solution of Direct Geometric for Planar Stewart Platform.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Analytical Workspace of Planar Stewart Platform.
- Khaled FOUDA, Anas AMMOUNAH, Samer ALFAYAD, Fethi B. OUEZDOU: Closed-form solution of Direct Geometric for 6 DOF Stewart Platform.
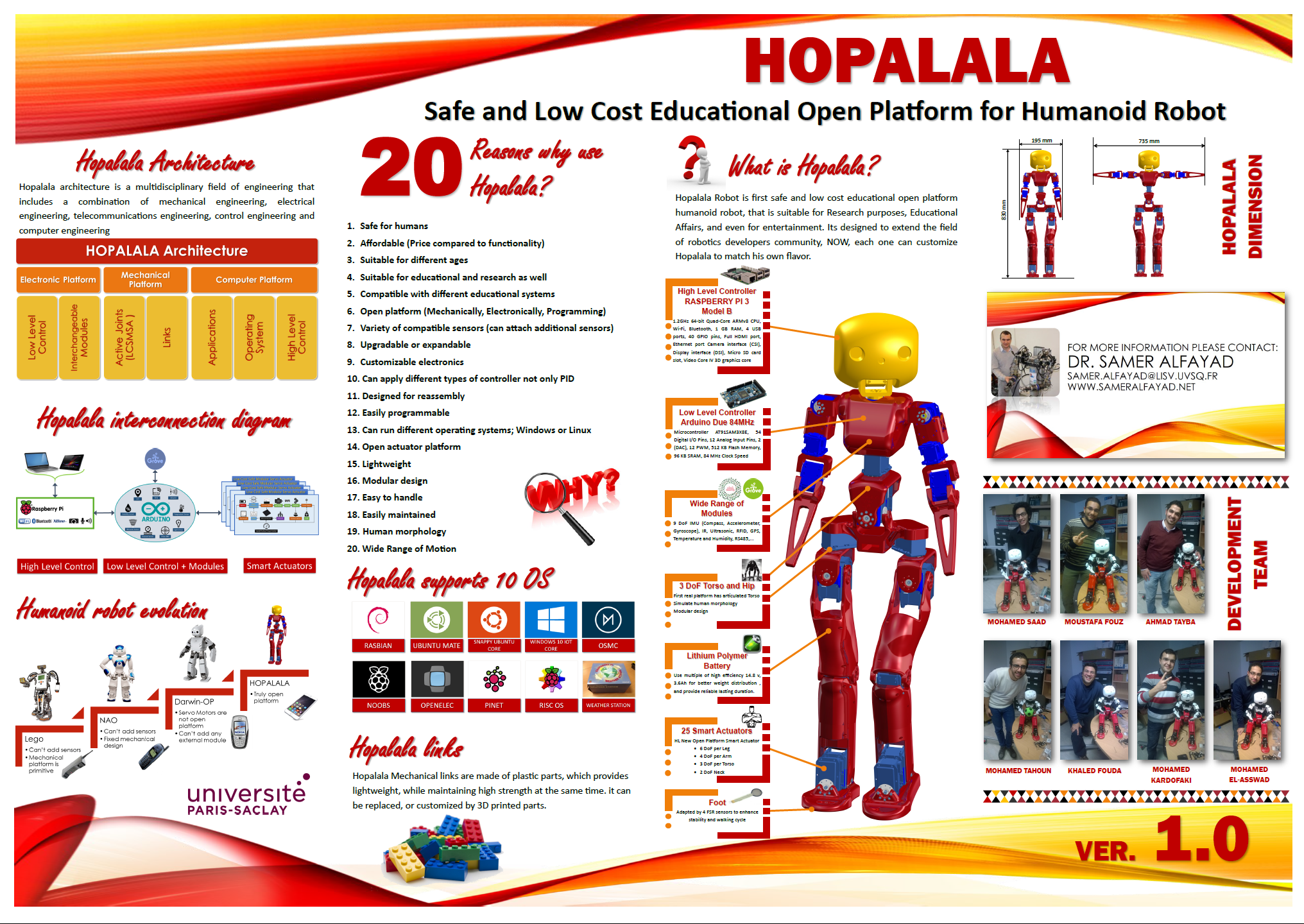
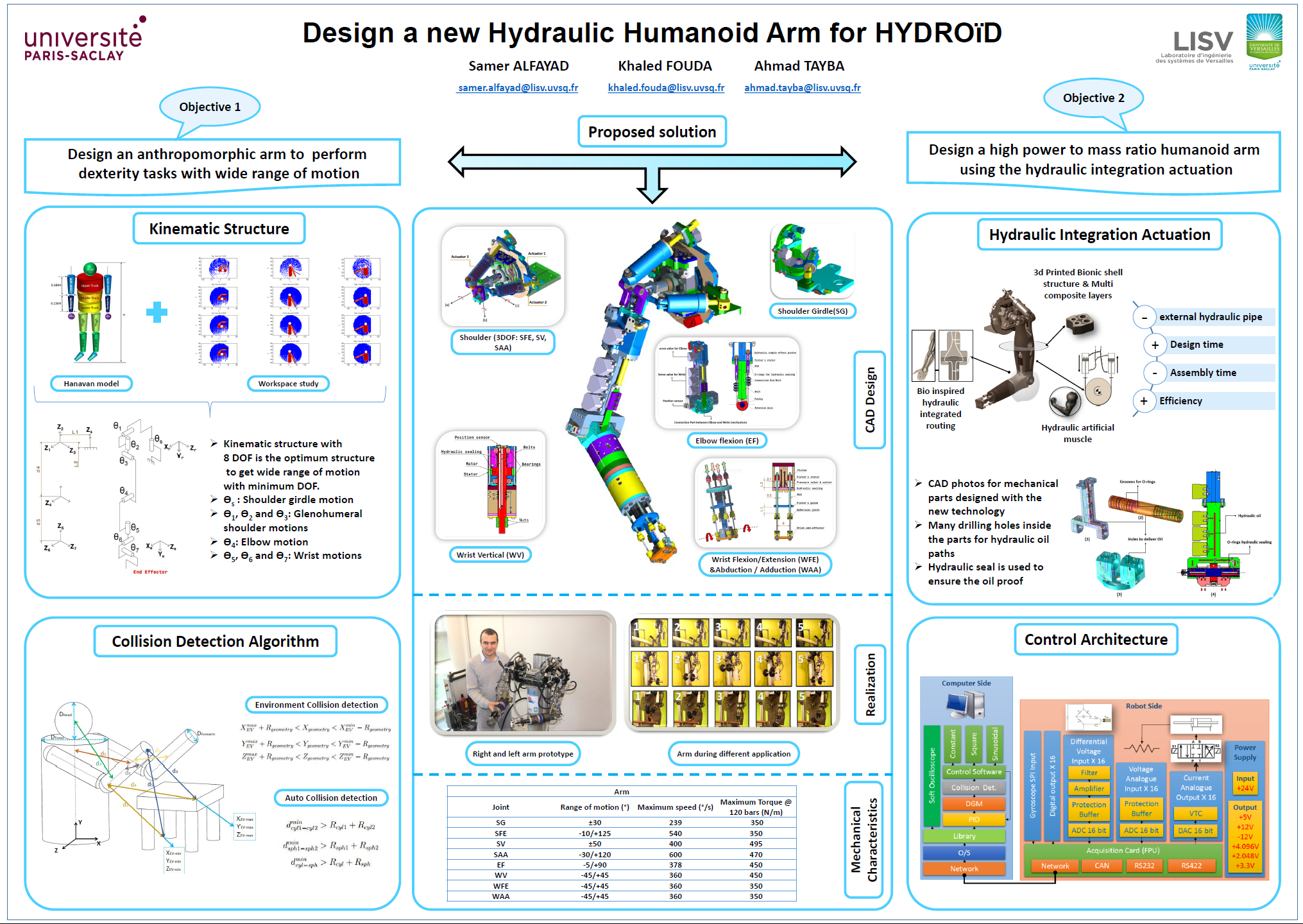
- Samer Alfayad, Fouda, Khaled., Ahmad Tayba: An Integrated Hydraulic Humanoid Robot Arm – Part I: Kinematic Structure, Modeling & Performances Analysis
- Samer Alfayad, Fouda, Khaled., Ahmad Tayba: An Integrated Humanoid Hydraulic Robot Arm – Part II: Prototype Design & Experimental Results
-
-
-
- AlFayad Samer, Kardofaki Mohamed, Fouda Khaled “Multidirectional Active Integrated Omni wheel Motor”. Registered at National Institute of Industrial Property in France No: FR3063453, on 2nd March 2017.
- Fouda Khaled “Apparatus to Generate Electricity from the Earth Gravity and Distillate Water”. Registered at Academy of Scientific Research and Technology, Patent Office on 31st July 1996.
Kindly follow me on Google scholar or on Research gate
